ˇŇĂăŞé§Ňąŕ«ąŕ«ÍĂěÇŃ´¤ÇŇÁŕĂč§áşşĘŇÁ᡹
âÁ´ŮĹÇŃ´¤ÇŇÁŕĂč§áşşĘŇÁ᡹
ADXL345
şÍĂě´âÁ´ŮĹ·ŐčˇĹčŇǶ֧㹺·ąŐé¤×Í
âÁ´ŮĹÇŃ´¤ÇŇÁŕĂč§áşşĘŇÁ᡹Ẻ´Ô¨Ô·ŃĹ·ŐčăŞéŞÔ»ŕşÍĂě ADXL345 ŕ»çąŕ«ąŕ«ÍĂěÇŃ´ĘŃŇł¤ÇŇÁŕĂč§ăąĘŇÁ᡹
·ŐčÁŐąÔÂŇÁ·ÔȷҧáĘ´§ÍÂŮčşąşÍĂě´ÍÂčҧŞŃ´á¨é§ (ĂŮ»·Őč 10.1)
â´ÂâÁ´ŮĹąŐéăËéăËéĘŃŇł˘ŇÍ͡ŕ»çą˘éÍÁŮĹ´Ô¨Ô·ŃĹáĹеԴµčÍăŞé§ŇąĽčŇą I2C ä´éáĹĐĘŇÁŇöˇÓËą´¤čҤÇŇÁâąéÁ¶čǧĘ٧ĘŘ´·ŐčÍčŇą
ä´éĘ٧ĘŘ´¶Ö§ ±16g (±2g, ±4g, ±8g, áĹĐ ±16g) â´Â g ¤×ͤčҤÇŇÁŕĂ觨ҡáç´Ö§´Ů´˘Í§âš (»ĂĐÁŇł 10 m/s2)
ŞÔ» ADXL345
ŕ»çąĂĐşşÇŃ´ˇŇĂŕĂ觤ÇŇÁŕĂçÇ áşş 3 ᡹·Őč·Ó§Ňąä´éăąĂĐ´ŃşˇŇĂăŞéľĹѧ§Ňą·ŐčµčÓÁҡ
ÇŃ´ä´é·Ń駤ÇŇÁŕĂč§/¤ÇŇÁŕĂçÇáşşä´ąŇÁÔˇÍŃąŕ»çąĽĹÁҨҡˇŇĂŕ¤Ĺ×čÍąäËÇËĂ×ÍáçˇĂĐá·ˇáĹСŇĂŕĂ觤ÇŇÁŕĂçÇáşş¤§·ŐčŕŞčąˇŇĂŕÍŐ§
§čҵč͡ŇĂĘ×čÍĘŇáѺäÁâ¤Ă¤Íąâ·ĂĹŕĹÍĂěĂŘčąăËÁč ć ĽčŇąˇŇĂĘ×čÍĘŇĂáşş I2C ·ŐčăŞéŕľŐ§˘Ň SCL áĹĐ SDA

ĂŮ»·Őč
10.1
âÁ´ŮĹÇŃ´¤ÇŇÁŕĂč§áşş 3 ᡹ ADXL345
¤ŘłĘÁşŃµÔ˘Í§ŞÔ»ÇŃ´¤čҤÇŇÁŕĂč§
ADXL345
- ăŞéäżŕĹŐé§㹪čǧˇÇéҧ 2.0 - 3.6 V
-
ˇÔąľĹѧ§ŇąµčÓÁҡ (23 µA ·ŐčäżŕĹŐé§ 2.5 V)
-
ĘŇÁŇöŕĹ×͡¤ÇŇÁĹĐŕÍŐ´㹡ŇĂÇŃ´ĽčŇą¤ÓĘŃ觷ŐčĂŃşĽčŇąˇŇĂĘ×čÍĘŇĂẺ͹ءĂÁä´é
- ˘éÍÁŮĹ·ŐčÍčŇąä´éÁŐ¤ÇŇÁĹĐŕÍŐ´Ę٧¶Ö§ 0.004 g/LSB (13 şÔµ)
-
ĘŇÁŇöąÓÁŇŕŞ×čÍÁµčÍä´é·Ńé§áşşáşş SPI áĹĐ I2C
ˇŇĂÇŃ´¤ÇŇÁŕĂč§áşş
3 ᡹
ˇŇĂÇŃ´ÁŘÁŕÍŐ§˘Í§ŕ«ąŕ«ÍĂěĘŇÁŇö·Óä´éâ´ÂˇŇĂÇŃ´¤ÇŇÁŕĂč§ăąáµčĹĐ᡹
â´Â·ŃčÇä»ŕĂҨйÔÂŇÁˇŇĂŕÍŐ§ŕÁ×čÍŕ·ŐÂşˇŃşáˇąËĂ×ÍĂĐşşľÔˇŃ´ÍéҧÍÔ§
â´ÂşÍˇ¤ÇŇÁŕÍŐ§ŕ»çąÁŘÁ·ŐčËÁŘąŕÍŐ§ä»ăąáˇąËąÖč§ ć
«Ö觡ŇĂŕÍŐ§ăąáµčĹĐ·ÔȨĐÁŐĹѡɳСŇáÓËą´·Ôȷҧ´Ń§ĂŮ»·Őč 10.2

ĂŮ»·Őč
10.2
·ÔȷҧˇŇĂŕÍŐ§ăąÁŘÁµčҧ ć ŕĘÁ×ÍąˇŇĂËÁŘąĂͺ᡹ X, Y áĹĐ Z
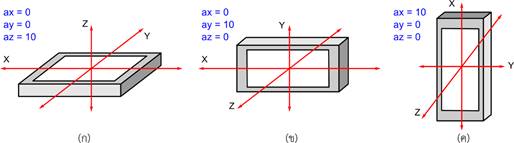
âÁ´ŮĹÇŃ´¤ÇŇÁŕĂ觹Őé¨ĐÇŃ´¤ÇŇÁŕĂč§ăąáµčĹĐ᡹ ˇç¤×Í
˘łĐ·ŐčâÁ´ŮĹÍÂŮčąÔč§ ć ¤čҤÇŇÁŕĂč§ăąáµčĹĐ᡹ąčҨĐÁŐ¤čŇŕ»çąČŮąÂě áµč㹤ÇŇÁŕ»çą¨ĂÔ§ÍÂčŇĹ×ÁÇčŇÂѧÁŐáçâąéÁ¶čǧ˘Í§âšÍÂŮč´éÇÂ
´Ń§ąŃ鹤čŇ·ŐčÍčŇąä´é¨Ö§äÁčä´éŕ»çąČŮąÂě·Ńé§ËÁ´ ¤×Í ¶éŇŕĂҵŃé§ŕ¤Ă×čͧăËé᡹ Z µŃ駩ҡˇŃşľ×éąâš ᡹ X áĹĐ Y ¨Đŕ»çą 0 áµčÇčŇ᡹ Z ¨ĐäÁčŕ»çą
0 ŕľĂŇĐÁŐáçâąéÁ¶čǧ˘Í§âšˇĂĐ·ÓÍÂŮč ´Ń§ąŃ鹤čŇ·Őčä´é¨Ňˇáˇą
Z ¨Ö§ÁŐ¤čŇ 9.81 m/s2 ËĂ×Í»ĂĐÁŇł 10 m/s2 ĂŮ»·Őč 10.3 áĘ´§ĹѡɳСŇĂÇҧâÁ´ŮĹ·Őč·ÓăËéÍčŇą¤čŇä´é¤čҵčҧ ć
ĂŮ»·Őč
10.3
ĹѡɳСŇĂÇҧâÁ´ŮĹăËé᡹ (ˇ) Z (˘) Y áĹĐ (¤) X µŃ駩ҡˇŃşĽÔÇâš
µŇÁĹÓ´Ńş
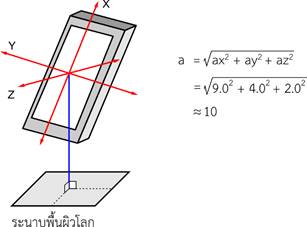
㹡óշŐčÍÂŮčąÔč§ ć áĹĐ᡹ X, Y áĹĐ Z äÁčÁŐ᡹㴵Ń駩ҡˇŃşľ×éąâš áçâąéÁ¶čǧ˘Í§âš·ŐčˇĂзӡѺáµčĹĐ᡹˘Í§âÁ´ŮĹÇŃ´¤ÇŇÁŕĂ觡ç¨ĐˇĂШŇÂÍ͡ä»ăąáµčĹĐ᡹
˘ÖéąÍÂŮčˇŃşˇŇĂŕÍŐ§˘Í§ŕ«ąŕ«ÍĂě
áµčŕÁ×čͤԴŕǡŕµÍĂěĹŃľ¸ě·ŐčµŃ駩ҡˇŃşľ×éąâšˇçÁŐ¤čŇ»ĂĐÁŇł 10 m/s2
´Ń§áĘ´§ăąĂŮ»·Őč 10.4
ĂŮ»·Őč
10.4 µŃÇÍÂčҧ¤čŇ·ŐčÍčŇąä´éŕÁ×čÍÇҧâÁ´ŮĹăąĹѡɳĐäÁčµŃ駩ҡˇŃşľ×éąâš
äĹşĂŇĂŐáĹФÓĘŃ觷ŐčŕˇŐčÂǢéͧ
㹢Ńéąáá˘Í§ˇŇĂăŞé§ŇąâÁ´ŮĹ
ADXL345
ŕĂҨеéͧ´ŇÇąěâËĹ´äĹşĂŇĂŐÁŇŧăąâ»ĂáˇĂÁ Arduino IDE ŕĘŐ¡čÍą â´ÂĽŮéăŞé¨Đµéͧ´ŇÇąěâËĹ´äĹşĂŇĂŐĘͧµŃǤ×Í Adafruit_Sensor ¨Ňˇ https://github.com/adafruit/Adafruit_Sensor áĹĐ Adafruit_ADXL345 ¨Ňˇ https://github.com/adafruit/Adafruit_ADXL345
â´ÂËĹѧ¨ŇˇµÔ´µŃé§äĹşĂŇĂŐŧăą
Arduino
IDE áĹéÇ ĽŮéăŞéĘŇÁŇöŕĂŐ¡ăŞé§ŇąâÁ´ŮĹ ADXL345 ä´éâ´ÂŕĂÔčÁ¨ŇˇˇŇĂŕľÔčÁäĹşĂŇĂŐ 3 µŃÇä´éáˇč Wire.h,
Adafruit_Sensor.h áĹĐ Adafruit_ADXL345_U.h áĹéǨ֧ˇÓËą´Çѵ¶Ř¤×Í âÁ´ŮĹ ADXL345 ·ŐčŕŞ×čÍÁµčÍ
â´ÂăŞé¤ÓĘŃč§
Adafruit_ADXL345_Unified accel = Adafruit_ADXL345_Unified(12345);
â´Â accel ¤×ÍŞ×čÍÇѵ¶Ř·ŐčĘĂéҧ¨Ňˇ¤ĹŇĘ Adafruit_ADXL345_Unified
«Ö觤ĹŇĘąŐéŕ»çą¤ĹŇĘ·ŐčăŞé§Ňąä´éÍÂčҧËĹҡËĹŇ ÁտѧˇěŞŃą·Őčŕ»çąŕÁ¸Í´·ŐčÍčŇą¤čҤÇŇÁŕĂč§ÍÂŮčŔŇÂăą
ľĂéÍÁăËéŕĂŐ¡ăŞé§Ňą â´ÂˇŇĂŕŞ×čÍÁµčÍâÁ´ŮĹąŐé ŞÔ» ADXL345
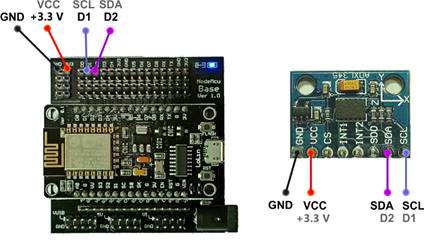
ˇÓËą´ăËéÁŐˇŇĂŕŞ×čÍÁµčÍáşş I2C â´ÂÁŐ address
¤×Í 0x53 áĹĐŕŞ×čÍÁµčÍĽčŇą˘Ň D1 áĹĐ D2 ˘Í§ NodeMCU
żŃ§ˇěŞŃą
begin()
ŕ»çążŃ§ˇěŞŃą·ŐčŕĂŐ¡ŕľ×čÍăŞéµĂǨĘÍşˇŇĂŕŞ×čÍÁµčͧ͢âÁ´ŮĹáĹĐäÁâ¤Ă¤Íąâ·ĂĹŕĹÍĂě
â´ÂËĹѧ¨Ňˇ·ŐčŕŞ×čÍÁµčÍä´éáĹéÇ
ŕĂҨĐĘŇÁŇöˇÓËą´˘Íşŕ˘µ˘Í§ˇŇĂÍčŇą¤čŇä´éâ´ÂăŞé¤ÓĘŃč§ accel.setRange(ADXL345_RANGE_xx_G) â´Â xx
= 2, 4, 8, 16 áĹСÓËą´ÍѵĂŇŕĂçÇ㹡ŇĂĘ觢éÍÁŮĹ ´éǤÓĘŃč§ setDataRate(dataRate) â´ÂżŃ§ˇěŞŃą·ŐčˇĹčŇǶ֧ąŐé ¨ĐÍÂŮčăąĘčÇą˘Í§ setup() ˘Í§â»ĂáˇĂÁ
ˇŇĂŕĂŐ¡ăŞé§Ňą
(ÍčŇą¤čŇ) ¤ÇŇÁŕĂ觨ҡâÁ´ŮĹ·Óä´éâ´ÂˇÓËą´µŃÇá»Ă ŕ˵ءŇĂłě ¤×Í sensors_event_t event; ¨ŇˇąŃ鹨֧ăŞéżŃ§ˇěŞŃą (ŕÁ¸Í´) getEvent
ŕľ×čÍÍčŇą¤čҤÇŇÁŕĂč§áĹéÇŕĂŇĘŇÁŇöŕĂŐ¡´Ů¤čҤÇŇÁŕĂč§ăąáµčĹĐ᡹ä´é¨Ňˇ
event.acceleration.x (.y áĹĐ .z)
㹡ŇĂăŞé§ŇąâÁ´ŮĹąŐé
ËҡŕĂҵéͧˇŇäčŇ·Őč¶ŮˇµéͧáÁčąÂÓ ŕĂŇÍҨ¨Đ·ÓˇŇĂŕ·ŐÂşÇŃ´ (calibration) ˇčÍą ´éÇÂÇÔ¸ŐˇŇ÷ҧ«ÍżµěáÇĂě â´ÂĽŮé·ŐčĘąă¨ÇÔ¸ŐˇŇĂąŐé
ˇçĘŇÁŇöČÖˇÉŇŕľÔčÁŕµÔÁä´é¨ŇˇáËĹ觤ÇŇÁĂŮéăąÍÔąŕ·ÍĂěŕąçµŕŞčą https://learn.adafruit.com/adxl345-digital-accelerometer/programming
ĘÓËĂŃş˘Ň·ŐčăŞé㹡ŇĂŕŞ×čÍÁµčÍŕľ×čÍăŞé§ŇąâÁ´ŮĹ
ADXL345 ÁŐ´éÇ¡ѹ 4 ˘Ň ¤×Í VCC, GND, SDA áĹĐ SCL â´Â㹡ŇĂ·´ĹͧąŐé ŕĂҨĐŕŞ×čÍÁµčÍ˘Ň D1 áĹĐ D2
˘Í§ NodeMCU ŕ˘éҡѺ˘Ň SCL áĹĐ SDA µŇÁĹÓ´Ńş
ˇŇĂ·´ĹͧÇŃ´¤čҤÇŇÁŕĂč§
Çѵ¶Ř»ĂĐʧ¤ě
1.
ĘŇÁŇöµčÍǧ¨Ă NodeMCU
v.3 ˇŃşâÁ´ŮĹÇŃ´¤ÇŇÁŕĂč§ 3 ᡹ ä´é
2.
ĘŇÁŇöŕ˘ŐÂąâ»ĂáˇĂÁáĘ´§ĽĹˇŇĂÇŃ´¤ÇŇÁŕĂč§ä´é
3.
ĘŇÁŇöŕ˘ŐÂąâ»ĂáˇĂÁŕľ×čÍąÓ¤čҤÇŇÁŕĂ觷ŐčÇŃ´ä´éä»ăŞé§ŇąµčÍä»ä´é
ÍŘ»ˇĂłě·ŐčăŞé㹡ŇĂ·´Ĺͧ
1. ŕ¤ĂŐčͧ¤ÍÁľÔÇŕµÍĂě·ŐčÁŐĂĐşş»ŻÔşŃµÔˇŇĂ
Windows
(µŃé§áµč Windows 7 ˘Öéąä»)
ľĂéÍÁµÔ´µŃé§â»ĂáˇĂÁ Arduino IDE 1.8.8 IoT 1
ŕ¤Ă×čͧ
2. NodeMCU v.3 1
şÍĂě´
3. NodeMCU Base
Ver 1.0 1
şÍĂě´
4. şÍĂě´âÁ´ŮĹÇŃ´¤ÇŇÁŕĂč§ 3
᡹ ´éÇÂäÍ«ŐŕşÍĂě ADXL345 1
şÍĂě´
5. ĘŇÂ USB 1
ŕĘéą
6. ĘҵčÍǧ¨Ă
(ĘҨŃÁľě ŕÁŐÂ-ŕÁŐÂ) 4 ŕĘéą
ÇÔ¸ŐˇŇĂ·´Ĺͧ
µÍą·Őč
1
1.
µčÍǧ¨ĂµŇÁĂŮ»·Őč 10.5
2.
ŕ˘ŐÂąâ¤é´â»ĂáˇĂÁŕľ×čÍÍčŇą¤čҤÇŇÁŕĂ觷Ńé§ĘŇÁ᡹áĹĐáĘ´§ĽĹĽčŇąľÍĂěµÍąŘˇĂÁ
ĂŮ»·Őč
10.5
ˇŇĂŕŞ×čÍÁµčÍáşş I2C
ĂĐËÇčҧ NodeMCU ˇŃşâÁ´ŮĹÇŃ´¤ÇŇÁŕĂč§
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 |
// Read 3-axis accelerometer by NodeMCU
ESP8266 #include <Wire.h> #include <Adafruit_Sensor.h> #include <Adafruit_ADXL345_U.h> Adafruit_ADXL345_Unified accel =
Adafruit_ADXL345_Unified(12345); void setup() { Serial.begin(9600); Serial.println("Accelerometer
Test"); Serial.println(""); if(!accel.begin()) { Serial.println("Oops, no ADXL345 detected."); while(1); } accel.setRange(ADXL345_RANGE_16_G); } void loop() { sensors_event_t
event; accel.getEvent(&event); Serial.print("X:
"); Serial.print(event.acceleration.x); Serial.print("
"); Serial.print("Y:
"); Serial.print(event.acceleration.y); Serial.print("
"); Serial.print("Z:
"); Serial.print(event.acceleration.z); Serial.print("
"); Serial.println("m/s^2"); delay(500); } |
3.
·´ĘÍşĽĹˇŇĂÇŃ´¤ÇŇÁŕĂč§ăąáąÇ᡹ X, Y, áĹĐ Z â´ÂˇŇĂËÁŘąŕ«ąŕ«ÍĂěăą·Ôȵčҧ
ć áĹéÇÍčŇą¤čŇ·ŐčáĘ´§
µÍą·Őč
2
1.
µčÍǧ¨ĂµŇÁĂŮ»·Őč 10.5
2.
ŕ˘ŐÂąâ¤é´â»ĂáˇĂÁŕľ×č͵ĂǨĘÍşŕ˵ءŇĂłěˇŇĂŕ¤Ĺ×čÍą·ŐčÍÂčҧĂÇ´ŕĂçÇ
«Öč§ŕ»çąŕ˵ءŇĂłě·Őč·ÓăËéÁŐ˘ąŇ´¤ÇŇÁŕĂč§ĂÇÁŕˇÔą 20 m/s2 áĹĐáĘ´§ĽĹŕ»çą˘éͤÇŇÁĽčŇąľÍĂěµÍąŘˇĂÁ
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 |
//Detect
event by accelerometer + NodeMCU ESP8266 #include <Wire.h> #include <Adafruit_Sensor.h> #include <Adafruit_ADXL345_U.h> Adafruit_ADXL345_Unified
accel = Adafruit_ADXL345_Unified(12345); // Threshold
value for detecting accident event float acth = 20.0; float acx,acy,acz,ac; void setup() { Serial.begin(9600); Serial.println("Accelerometer
Test"); Serial.println(""); if(!accel.begin()) { Serial.println("Oops, no ADXL345
detected."); while(1); } accel.setRange(ADXL345_RANGE_16_G);
} void loop() { sensors_event_t
event; accel.getEvent(&event); acx
= event.acceleration.x; acy
= event.acceleration.y; acz
= event.acceleration.z;
ac = sqrt(pow(acx,2)+pow(acy,2)+pow(acz,2)); if(ac
> acth) { Serial.println("accident detected!"); } delay(100); } |
3.
·´ĘÍşĽĹâ´ÂˇŇâÂŃşŕ«ąŕ«ÍĂěŕĂçÇ ć áĹéÇĘѧࡵ·Őč Serial Monitor