ˇŇäǺ¤ŘÁÁÍŕµÍĂě俵ç
ÁÍŕµÍĂě俵ç
ÁÍŕµÍĂěŕ»çąÍŘ»ˇĂłěäżżéŇ·ŐčÁŐˇŇĂăŞé§ŇąÍÂčҧáľĂčËĹŇ â´Â·ÓËąéŇ·Őčŕ»çąĘčÇą»ĂСͺËĹѡ㹡ŇĂ·ÓăËéŕˇÔ´ˇŇĂŕ¤Ĺ×čÍą·Őč˘Í§ŞÔéąĘčÇąµčҧ
ć ´Ń§ąŃ鹡ŇĂČÖˇÉŇâ¤Ă§ĘĂéҧ ˇŇ÷ӧҹáĹСŇäǺ¤ŘÁÁÍŕµÍĂě ¨Ö§ŕ»çąĘčǹ˹Ö觷ŐčÁŐ¤ÇŇÁĘÓ¤Ń
ÁÍŕµÍĂě¨Đ·ÓËąéŇ·Őčá»Ĺ§ľĹѧ§ŇąäżżéŇŕ»çąľĹѧ§ŇąˇĹ â´ÂŕĂŇÍҨáşč§ÁÍŕµÍĂěµŇÁĂĐşşäż·ŐčăŞéä´é
2 »ĂĐŕŔ· ¤×Í
1. ÁÍŕµÍĂěäżżéҡĂĐáʵç (DC Motor)
2. ÁÍŕµÍĂěäżżéҡĂĐáĘĘĹŃş (AC Motor)
â´ÂÁÍŕµÍĂě·Ńé§Ęͧ»ĂĐŕŔ·¨ĐÁŐĘčÇą»ĂСͺ·ŐčᵡµčҧˇŃąÍ͡仺éҧáµčĘčÇą»ĂСͺËĹѡ¤×ͨĐÁŐĘčÇą·ŐčÍÂŮčˇŃş·ŐčŕĂŇŕĂŐ¡ÇčŇ
ĘŕµŕµÍĂě (Stator)
áĹĐĘčÇą·Őčŕ¤Ĺ×čÍą·Őč«Öč§ŕĂŇŕĂŐ¡ÇčŇ âĂŕµÍĂě (Rotor) ÁÍŕµÍĂěäżżéҡĂĐáʵçÁŐ´éÇ¡ѹËĹŇÂáşş
ĘÓËĂŃşÁÍŕµÍĂěäżżéҡĂĐáʵçÍÂčҧ§čҤ×ÍÁÍŕµÍĂě·ŐčăŞéáÁčŕËĹ硶ŇÇĂ
ËĹѡˇŇ÷ӧҹ
ÁÍŕµÍĂě¨ĐÍŇČŃÂáç´Ů´áĹĐáçĽĹѡ·ŐčŕˇÔ´¨ŇˇĘąŇÁáÁčŕËĹçˇŕÁ×čÍÁŐˇĂĐáĘäËĹĽčŇąĹÇ´µŃǹӨзÓăËéŕˇÔ´ĘąŇÁáÁčŕËĹçˇĂÍşµŃÇąÓąŃéą
¶éŇŕĂŇąÓµŃǹӴѧˇĹčŇÇä»ÇҧäÇéăąĘąŇÁáÁčŕËĹ硨ҡáÁčŕËĹ硶ŇÇáç¨ĐŕˇÔ´ˇŇõéŇąáĹĐŕĘĂÔÁˇŃşŕĘéąáçáÁčŕËĹ硨ҡáÁčŕËĹ硶ŇÇĂ
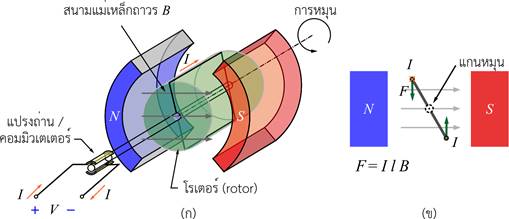
·ÓăËéŕˇÔ´áç´Ů´áĹĐáçĽĹѡ˘Öéą·Ő袴ĹÇ´ ĂŮ»·Őč 1(ˇ) áĘ´§ĹѡɳĐâ¤Ă§ĘĂéҧ˘Í§ÁÍŕµÍĂě俵ç·ŐčăŞéáÁčŕËĹ硶ŇÇĂăąĘčÇą˘Í§ĘŕµŕµÍĂěáĹĐÁŐˇŇĂ»éÍąˇĂĐáĘĽčŇą¤ÍÁÁÔÇŕµŕµÍĂěä»ÂѧâĂŕµÍĂě
ŕľ×čÍăËé᡹ŕËĹ硷ŐčâĂŕµÍĂěŕ»çąáÁčŕËĹçˇäżżéŇ ´Ń§áĘ´§ăąĂŮ»·Őč 1(˘) â´ÂˇĂĐáĘäżżéŇ I
¨Đ·ÓăËéŕˇÔ´áç F ˘Öéą
¨ŇˇĂŮ»·Őč 1 ¨ĐŕËçąä´éÇčŇŕÁ×čͨčŇ¡ĂĐáĘĽčŇą˘ŃéǵčÍ·ŐčŕĂŐ¡ÇčŇá»Ă§¶čŇą
(brushes)
ä»ÂѧǧáËÇąľÔŕČÉ·ŐčŕĂŐ¡ÇčŇ ¤ÍÁÁÔÇŕµŕµÍĂě (commutator) «Ö觵čÍŕ˘éҡѺǧĂÍşµŃÇąÓˇĂĐáĘ·ŐčäËĹĽčŇąµŃǹӨзÓăËéŕˇÔ´ŕĘéąáçáÁčŕËĹçˇĂÍşµŃÇąÓâ´Â´éҹ˹Ö觨ĐŕˇÔ´ŕ»çąáçĽĹѡ˘Öéą
·ÓăËéǧĂÍşµŃÇąÓÁŐˇŇĂËÁŘą â´Âáç·ŐčŕˇÔ´¨Đá»ĂµŇÁ ˇĂĐáĘ·ŐčäËĹĽčŇą I
¤ÇŇÁÂŇǢͧµŃÇąÓ láĹФÇŇÁŕ˘éÁ˘Í§ĘąŇÁáÁčŕËĹ硶ŇÇĂ
B
ĂŮ»·Őč
1
(ˇ) â¤Ă§ĘĂéҧáĹĐ (˘) ˇŇ÷ӧҹ˘Í§ÁÍŕµÍĂě俵ç
ĂŮ»·Őč 2
áĘ´§ŔŇľ¶čŇÂĹѡɳĐŔŇÂ㹢ͧÁÍŕµÍĂě俵碹ҴŕĹ硷ŃčÇä» â´ÂĂŮ»·Őč 2(ˇ) áĘ´§ĘčÇą˘Í§ĘŕµŕµÍĂě«Ö觻ĂСͺ´éÇÂáÁčŕËĹ硶ŇÇĂáĹĐĘčÇą˘Í§á»Ă§¶čŇą«Öč§ŕ»çąĘčÇą·ŐčÍÂŮčąÔ觢ͧ˘ŃéÇ·ŐčĘ觡ĂĐáĘäżżéŇŕ˘éŇä»Âѧ˘´ĹÇ´ÍŇĂěŕÁŕ¨ÍĂě
áĹĐ ĂŮ»·Őč 2(˘) áĘ´§ĘčÇą˘Í§âĂŕµÍĂě â´ÂÁÍŕµÍĂě俵ç·ŐčăŞéáÁčŕËĹ硶ŇÇĂ㹷ҧ»ŻÔşŃµÔ¨ĐÁŐˇŇĂŕľÔčÁ¤ÇŇÁÂŇǢͧĹÇ´µŃÇąÓ«Öč§ŕ»çąĘčÇą˘Í§˘´ĹÇ´şąâĂŕµÍĂěâ´ÂˇŇþѹ˘´ĹÇ´Ăͺ᡹âĹËĐ
«Öč§ŕĂŇÁѡŕĂŐ¡˘´ĹÇ´ąŐéÇčŇ ˘´ĹÇ´ÍŇĂěŕÁŕ¨ÍĂě (armature) ŕľ×čÍŕ»çąˇŇĂŕľÔčÁáçşÔ´ăËéˇŃşÁÍŕµÍĂě
¤ÍÁÁÔÇŕµŕµÍĂěŕ»çąĘčÇą·ŐčËÁŘą˘Í§˘ŃéÇ·ŐčĂŃşˇĂĐáĘäżżéŇŕ˘éŇä»Âѧ˘´ĹÇ´ÍŇĂěŕÁŕ¨ÍĂě·ŐčÍÂŮčşąâĂŕµÍĂě ´Ń§áĘ´§ăąĂŮ»·Őč 2(˘)

ĂŮ»·Őč
2
ŔŇľ¶čŇÂŔŇÂăąÁÍŕµÍĂě俵ç (ˇ) â¤Ă§ĘĂéҧáĹĐ (˘) ˇŇ÷ӧҹ˘Í§ÁÍŕµÍĂě俵ç
ÇÔ¸ŐˇŇäǺ¤ŘÁÁÍŕµÍĂě·ŃčÇä»
ÍҨáşč§µŇÁŞąÔ´˘Í§»ĂÔÁŇł·ŐčµéͧˇŇäǺ¤ŘÁ ¤×Í
1.
ˇŇäǺ¤ŘÁ·ÔȷҧˇŇĂËÁŘą˘Í§ÁÍŕµÍĂě (direction control)
2.
ˇŇäǺ¤ŘÁ¤ÇŇÁŕĂçǢͧÁÍŕµÍĂě (speed control)
3.
ˇŇäǺ¤ŘÁáçşÔ´˘Í§ÁÍŕµÍĂě (torque control)
ĘÓËĂŃşˇŇĂăŞé§Ňąŕş×éͧµéą·Őč¨ĐˇĹčŇǶ֧ăąŕ͡ĘŇĂąŐé
¨ĐáąĐąÓŕľŐ§ˇŇäǺ¤ŘÁ
·ÔȷҧˇŇĂËÁŘąáĹСŇäǺ¤ŘÁ¤ÇŇÁŕĂçǢͧÁÍŕµÍĂěăąĹѡɳĐÍÂčҧ§čŇÂŕ·čŇąŃéą
㹡ŇĂăŞé§ŇąÁÍŕµÍĂě˘ŃéąĘ٧ ¨ĐµéͧÁŐˇŇĂăŞéĂĐşş¤Çş¤ŘÁáĹĐÁŐˇŇĂ»éÍąˇĹŃşĂčÇÁ´éÇ «Öč§ČŇʵĂě´éŇąˇŇäǺ¤ŘÁÁÍŕµÍĂěŕ»çąĘÔ觷ŐčČÖˇÉҡѹăąĘҢŇÇÔČǡĂĂÁäżżéŇáĹĐÇÔČǡĂĂÁŕ¤Ă×čͧˇĹ
ŞŘ´ŕż×ͧ˘ŃşÁÍŕµÍĂě
ˇŇâѺŕ¤Ĺ×čÍąăËéĂĐşş·Ň§ˇĹŕ¤Ĺ×čÍąäËÇä´éąŃéąÁѡÁյ鹡ÓĹѧ·Ň§ˇĹ¨ŇˇÁÍŕµÍĂě
áµčâ´ÂĹӾѧÁÍŕµÍĂěŕľŐ§ÍÂčҧŕ´ŐÂÇÍҨäÁčĘŇÁŇö·Ó§ŇąĂĐşş·Ó§Ňąä´éÍÂčҧŕËÁŇĐĘÁ
ŕą×čͧ¨Ňˇ¤ÇŇÁŕĂçÇ㹡ŇĂËÁŘą˘Í§ÁÍŕµÍĂě·ŃčÇä»ÁŐ¤čҤčÍą˘éҧĘ٧ ŕĂҨ֧¨Óŕ»çąµéͧÁŐˇŇĂ»ĂŃş¤ÇŇÁŕĂçÇĂÍş´éÇÂŞŘ´ŕż×ͧ˘Ńş
(gearbox)
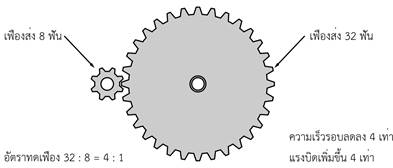
ÍѵĂŇ·´ŕż×ͧ ¤×ÍĘŃ´ĘčÇą˘Í§¨ÓąÇążŃąŕż×ͧ
2 µŃÇ â´ÂŕĂҨĐŕĂŐ¡ŕż×ͧµŃÇáá˘Í§ĂĐşşÇčŇŕż×ͧĘč§ ŕż×ͧ·ŐčµčÍŕľÔčÁŕ˘éŇÁŇáĹĐąÓĘč§áçşÔ´µčÍä»ŕĂŐ¡ÇčŇŕż×ͧĂŃş
¶éŇŕż×ͧĂŃşÁŐ˘ąŇ´ăËčˇÇčŇŕż×ͧĘ觨зÓăËéáçşÔ´ŕľÔčÁ˘ÖéąáĹФÇŇÁŕĂçÇŴŧ
¨ŇˇĂŮ»µŃÇÍÂčҧăąĂŮ»·Őč 3 ¨Đä´éÇčŇ ¶éŇŕż×ͧĘč§ËÁŘąä» 4 ĂÍş żŃąŕż×ͧ¨Đ·ÓăËéŕż×ͧĂŃşËÁŘąŕľŐ§ĂÍşŕ´ŐÂÇŕ·čŇąŃéą
¨ŇˇĹѡɳйŐéşÍˇä´éÇčŇŕż×ͧŕˇŐÂĂěÁŐÍѵĂŇ·´ 4:1 «Öč§ÁҨҡˇŇĂąÓ¤čҨӹǹżŃąŕż×ͧ˘Í§ŕż×ͧĂŃşµŃé§áĹéÇËŇĂ´éǤčҨӹǹżŃąŕż×ͧ˘Í§ŕż×ͧĘč§
ĂŮ»·Őč
3
µŃÇÍÂčҧˇŇĂ·´ĂÍş´éÇÂŕż×ͧ â´ÂÁŐÍѵĂŇ·´ 4:1
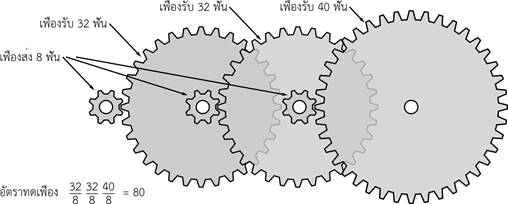
㹡óշŐčµéͧˇŇĂăËéÍѵĂŇ·´ŕż×ͧÁŐ¤čŇĘ٧Áҡ ć ŕŞčą 80:1
Ëҡŕ»çąĂĐşşŕż×ͧŕľŐ§ 1 ŞŃéą ¶éŇŕż×ͧĘč§ÁŐ˘ąŇ´ 8
żŃą¨ĐµéͧĘĂéҧŕż×ͧĂŃşÁŐ˘ąŇ´¶Ö§ 640 żŃą «Öč§ăą·Ň§»ŻÔşŃµÔŕĂŇäÁčĘŇÁŇö·ÓŕŞčąąŃéąä´é
ŕľĂŇеéͧăŞéŕż×ͧ·ŐčÁŐ˘ąŇ´ăËč ŕĂҨ֧µéͧÁŐˇŇĂĘĂéҧĂĐşş·´ŕż×ͧŕ»çąŞŃéą ć
µč͡ѹ仨ąä´éÍѵĂŇ·´·ŐčµéͧˇŇĂ ˇŇäӹdzËŇÍѵĂŇ·´·Óä´é´Ń§áĘ´§ăąµŃÇÍÂčҧăąĂŮ»·Őč 4
ĂŮ»·Őč
4
µŃÇÍÂčҧˇŇĂ·´ŕż×ͧËĹŇÂŞŃéą
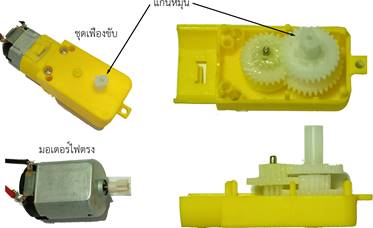
ĂŮ»·Őč 5 áĘ´§ŔŇľŔŇÂ㹡Ĺčͧŕż×ͧ˘Ńş·ŐčÁѡ¨ĐµÔ´µŃé§ÍÂŮčˇŃşÁÍŕµÍĂě俵碹ҴŕĹçˇ
â´ÂˇĹčͧŕż×ͧ˘ŃşąŐéÁŐÍѵĂŇ·´ŕż×ͧĂÇÁÁŐ¤čŇŕ·čҡѺ 48 (¨ŇˇĂĐşşŕż×ͧ·Őč«éÍąˇŃąÍÂŮčŔŇÂăą)
ĂŮ»·Őč
5
ŔŇľĘčÇą»ĂСͺŔŇÂ㹪شŕż×ͧ˘Ńş
ˇŇäǺ¤ŘÁÁÍŕµÍĂě俵ç
ˇŇäǺ¤ŘÁ·ÔȷҧˇŇĂËÁŘą
ˇŇäǺ¤ŘÁ·ÔȷҧˇŇĂËÁŘą˘Í§ÁÍŕµÍĂě俵ç ·Óä´éâ´ÂˇŇäǺ¤ŘÁ·ÔȡŇĂäËŢͧˇĂĐáĘ俵ç·ŐčĽčŇąÁÍŕµÍĂě
ąŃ蹤×Í ÁÍŕµÍĂě¨ĐËÁŘąˇŃş·ÔȷҧËҡÁŐˇŇáĹŃş·ÔȷҧˇŇĂ©Ő´ˇĂĐáĘ
â´ÂĂٻẺˇŇõčÍĘÇÔµŞěĘÓËĂŃş¤Çş¤ŘÁˇŇĂËÁŘą˘Í§ÁÍŕµÍĂěąŐé áĘ´§´Ń§ĂŮ»·Őč 6(ˇ)
áĹĐÁŐŞ×čÍŕĂŐ¡ÇčŇǧ¨ĂŕδşĂÔ´¨ě (H-bridge circuit) ŕą×čͧ¨ŇˇÇ§¨ĂÁŐĹѡɳĐŕ»çąĂŮ»µŃÇ H â´Â㹡ŇĂŕ»ĹŐčÂą·ÔȷҧˇŇĂËÁŘą˘Í§ÁÍŕµÍĂě
(ĂŮ»·Őč 6(˘) áĹĐ 6(¤)) ĘÇÔµŞě·Ńé§ĘŐčµŃǨеéͧ¶ŮˇĘĹŃşľĂéÍÁ ć ˇŃą
ŕľ×čÍÁÔăËéÁÍŕµÍĂěËÂŘ´ËÁŘąáĹĐäÁčăËéŕˇÔ´ˇŇĂĹѴǧ¨Ă 㹷ҧ»ŻÔşŃµÔŕĂŇÁѡ¨ĐăŞéäÍ«ŐĘÓŕĂç¨Ăٻ㹡ŇäǺ¤ŘÁˇŇĂËÁŘą˘Í§ÁÍŕµÍĂěŕľ×čÍËĹŐˇŕĹŐ觻ŃËҡŇĂĹѴǧ¨Ă
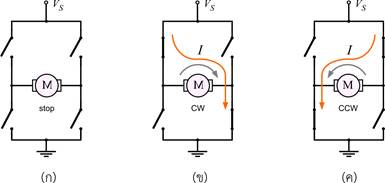
ĂŮ»·Őč
6
ŔŇľĹѡɳĐǧ¨ĂŕδşĂÔ´¨ě˘łĐ (ˇ) ÁÍŕµÍĂěäÁčËÁŘą (˘) ÁÍŕµÍĂěËÁŘąµŇÁŕ˘çÁąŇĚÔˇŇ (clockwise, CW) áĹĐ (¤) ÁÍŕµÍĂěËÁŘą·Çąŕ˘çÁąŇĚÔˇŇ (counter clockwise, CCW)
ˇŇäǺ¤ŘÁ¤ÇŇÁŕĂçÇÁÍŕµÍĂě
㹡ŇäǺ¤ŘÁ¤ÇŇÁŕĂçǢͧÁÍŕµÍĂě俵çĘŇÁŇö·Óä´éˇŇĂăŞéĘŃŇł
PWM
(Pulse Width Modulation, ˇŇĂÁÍ´Ůŕŵ¤ÇŇÁˇÇéҧľŃĹĘě) â´ÂˇÓËą´¤ÇŇÁˇÇéҧ˘Í§ĘŃŇł¨Đ·ÓăËéÁÍŕµÍĂě«Öč§ŕ»çąÍŘ»ˇĂłě·Ň§ˇĹ·ŐčÁŐˇŇõͺʹͧŞéŇŕÁ×čÍŕ·ŐÂşˇŃşĘŃŇłäżżéŇ
‘ĂŮéĘÖˇ’ ¶Ö§¤čŇŕ©ĹŐč¢ͧĘŃŇł
áĹĐ·ÓăËé¤ÇŇÁŕĂçÇ㹡ŇĂËÁŘą˘Í§ÁÍŕµÍĂě«Öč§á»ĂĽŃąâ´ÂµĂ§ˇŃşĂĐ´Ńşáç´ŃąÁŐ¤čŇŕ»ĹŐčÂąá»Ĺ§ä»
ĂŮ»·Őč 7 áĘ´§µŃÇÍÂčҧĘŃŇł PWM áĹФčŇŕ©ĹŐčÂ
«Öč§ÁŐ¤čŇŕ·čҡѺĽĹ¤Ůł˘Í§¤čŇáç´ŃąáĹФčŇĂÍşˇŇ÷ӧҹ (duty cycle) ˘Í§ĘŃŇł
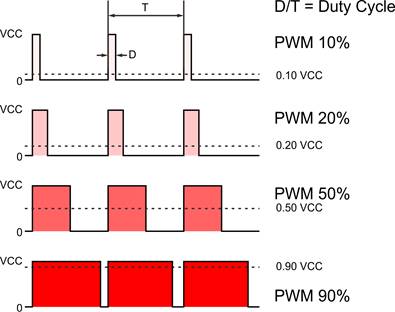
ĂŮ»·Őč
7
ĹѡɳĐĘŃŇł PWM ·ŐčĂÍşˇŇ÷ӧҹµčҧ ć ŕĘéą»ĂĐáĘ´§ĂĐ´Ńş¤čŇŕ©ĹŐč¢ͧĘŃŇłąŐé
㹡ŇĂŕ˘ŐÂąâ»ĂáˇĂÁ´éÇ Arduino IDE ¤ÓĘŃč§
analogWrite() ŕ»çą¤ÓĘŃ觷ŐčăŞé㹡ŇĂĘĂéҧĘŃŇł
PWM ¨ŇˇşÍĂě´äÁâ¤Ă¤Íąâ·ĂĹŕĹÍĂě â´Â¤ÓĘŃ觹ŐéÁŐĂٻẺ¤×Í
analogWrite(pin, value)
â´Â¤čŇ
pin
¤×ÍŞ×č͢ҴԨԷŃĹ (D0-D8) ·ŐčµéͧˇŇĂĘč§ĘŃŇł
PWM ÍÍˇä» áĹĐ ¤čŇ value ąŐé
¨Đŕ»çą¤čŇŕŢ°ŇąĘÔş ĂĐËÇčҧ 0 ¶Ö§ 1023 (= 210-1)
«Ö觤čŇĘ٧ĘŘ´ 1023 ąŐé¨Đŕ©ľŇĐŕ¨ŇШ§ˇŃşşÍĂě´ NodeMCU ŕą×čͧ¨Ňˇ
ESP8266 ŕ»çąŞÔ»»ĂĐÁÇĹĽĹáşş 10 şÔµ â´Âăąâ¤é´µčҧ ć
ăąäĹşĂŇĂբͧşÍĂě´ąŐé ¨ĐˇÓËą´ăËé¤čŇ 1023 ¤×͵ŃÇá»ĂŞ×čÍ PWMRANGE áĹФčŇĂÍşˇŇ÷ӧҹ˘Í§ĘŃŇł·ŐčĘč§Í͡ÁҨТÖ鹡Ѻ¤čŇ value ąŐé â´ÂĘŃŇł¨ĐÁŐ¤čҤҺ¤§·Őčŕ·čҡѺ 1 ÁÔĹĹÔÇÔąŇ·Ő (¤ÇŇÁ¶Őč 1 kHz) ĘÓËĂŃşŞÔ» ESP8266 ąŐé
şÍĂ촢ѺÁÍŕµÍĂě
㹡ŇâѺÁÍŕµÍĂě´éǤÓĘŃ觨ҡäÁâ¤Ă¤Íąâ·ĂĹŕĹÍĂěąŃéąŕĂŇÁѡ¨ĐµéͧăŞéşÍĂ촢ѺÁÍŕµÍĂěá¡¨ŇˇşÍĂě´äÁâ¤Ă¤Íąâ·ĂĹŕĹÍĂě
áĹĐăŞéäżŕĹŐé§ÁÍŕµÍĂěá¡¨ŇˇäżŕĹŐ駺ÍĂě´äÁâ¤Ă¤Íąâ·ĂĹŕĹÍĂě ŕą×čͧ¨ŇˇäÁâ¤Ă¤Íąâ·ĂĹŕĹÍĂě·ŃčÇä»
äÁčä´éÍ͡ẺÁŇăËéĘŇÁŇö¨čŇ¡ĂĐáĘĘ٧ ć ĘÓËĂŃşˇŇ÷ӧҹ˘Í§ÁÍŕµÍĂě â´Âăą·ŐčąŐéŕĂҨСĹčŇǶ֧şÍĂ촢ѺÁÍŕµÍĂě·ŐčăŞéäÍ«ŐŕşÍĂě
L298N (¨čŇ¡ĂĐáĘä´éĘ٧ĘŘ´ 2 A/ÁÍŕµÍĂě)
«Ö觺ÍĂě´ąŐéĘŇÁŇö˘ŃşÁÍŕµÍĂěä´é 2 µŃÇľĂéÍÁˇŃąáĹĐÁŐĹѡɳдѧĂŮ»·Őč 8
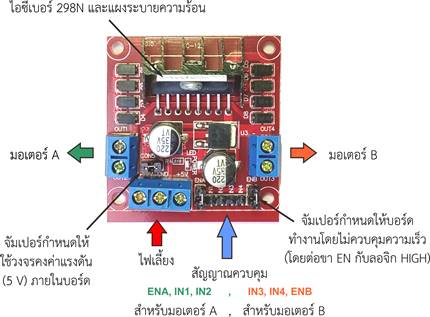
ĂŮ»·Őč
8
şÍĂ촢ѺÁÍŕµÍĂě
L298N
㹡ŇäǺ¤ŘÁˇŇĂËÁŘąáĹФÇŇÁŕĂçǢͧÁÍŕµÍĂěąŃéą
·Óâ´ÂˇŇĂ»éÍąĘŃŇł¤Çş¤ŘÁ¨Ňˇ şÍĂě´äÁâ¤Ă¤Íąâ·ĂĹŕĹÍĂěä»ÂѧşÍĂ촢ѺÁÍŕµÍĂě â´ÂÁŐĹѡɳТͧĘŃŇł¤Çş¤ŘÁ´Ń§áĘ´§ăąµŇĂҧ·Őč
1 â´ÂËҡŕĂҨФǺ¤ŘÁ·ÔȷҧˇŇĂËÁŘą˘Í§ÁÍŕµÍĂě A ˇç·Óä´éĽčŇąĘŃŇł·Őč˘Ň IN1
áĹĐ IN2 áĹСŇäǺ¤ŘÁ¤ÇŇÁŕĂçǢͧÁÍŕµÍĂě´éÇÂĘŃŇł
PWM ·Őč»éÍąăËéˇŃş˘Ň ENA «Öč§ËҡäÁčµéͧˇŇäǺ¤ŘÁ¤ÇŇÁŕĂçÇ
ˇç·Óä´éâ´ÂˇŇĂăŞé¨ŃÁŕ»ÍĂěşąşÍĂě´á·ąˇŇĂ»éÍąĘŃŇł áĹĐĘÓËĂŃşÁÍŕµÍĂě B ŕĂҡçĘŇÁŇö·Óä´é㹷ӹͧŕ´ŐÂǡѹ
µŇĂҧ·Őč
1
µŇĂҧáĘ´§ÇÔ¸ŐˇŇĂĘč§ĘŃŇł¤Çş¤ŘÁ·ÔȷҧáĹФÇŇÁŕĂçÇÁÍŕµÍĂě A áĹĐ B
|
|
·ÔȡŇĂËÁŘą |
IN1 |
IN2 |
IN3 |
IN4 |
¤Çş¤ŘÁ¤ÇŇÁŕĂçÇ´éÇÂĘŃŇł PWM |
|
|
ENA |
ENB |
||||||
|
ÁÍŕµÍĂě A |
µŇÁŕ˘çÁ |
HIGH |
LOW |
- |
- |
HIGH |
- |
|
·Çąŕ˘çÁ |
LOW |
HIGH |
- |
- |
HIGH |
- |
|
|
äÁčËÁŘą |
LOW |
LOW |
- |
- |
HIGH |
- |
|
|
äÁčËÁŘą |
HIGH |
HIGH |
- |
- |
HIGH |
- |
|
|
ÁÍŕµÍĂě B |
µŇÁŕ˘çÁ |
- |
- |
HIGH |
LOW |
- |
HIGH |
|
·Çąŕ˘çÁ |
- |
- |
LOW |
HIGH |
- |
HIGH |
|
|
äÁčËÁŘą |
- |
- |
LOW |
LOW |
- |
HIGH |
|
|
äÁčËÁŘą |
- |
- |
HIGH |
HIGH |
- |
HIGH |
|
ˇŇĂ·´Ĺͧ¤Çş¤ŘÁÁÍŕµÍĂě俵ç
Çѵ¶Ř»ĂĐʧ¤ě
1.
ĘŇÁŇöµčÍşÍĂě´ Node
MCU v.3 ˇŃşşÍĂ촢ѺÁÍŕµÍĂěáĹĐÁÍŕµÍĂěä´é
2.
ĘŇÁŇöŕ˘ŐÂąâ»ĂáˇĂÁăËé
NodeMCU
¤Çş¤ŘÁ·ÔȷҧˇŇĂËÁŘą˘Í§ÁÍŕµÍĂě俵çä´é
3.
ĘŇÁŇöŕ˘ŐÂąâ»ĂáˇĂÁăËé
NodeMCU
¤Çş¤ŘÁ¤ÇŇÁŕĂçÇ㹡ŇĂËÁŘą˘Í§ÁÍŕµÍĂě俵çä´é
ÍŘ»ˇĂłě·ŐčăŞé㹡ŇĂ·´Ĺͧ
1. ŕ¤ĂŐčͧ¤ÍÁľÔÇŕµÍĂě·ŐčÁŐĂĐşş»ŻÔşŃµÔˇŇĂ
Windows
(µŃé§áµč Windows 7 ˘Öéąä»)
ľĂéÍÁµÔ´µŃé§â»ĂáˇĂÁ Arduino IDE 1.8.8 IoT 1
ŕ¤Ă×čͧ
2. NodeMCU v.3 1
şÍĂě´
3. NodeMCU Base
Ver 1.0 1
şÍĂě´
4. şÍĂ촢ѺÁÍŕµÍĂě·ŐčăŞéäÍ«ŐŕşÍĂě
L298N 1 şÍĂě´
5. ÁÍŕµÍĂě俵ç 1
µŃÇ
6. ÍĐá´ç»ŕµÍĂě 9 V 1
µŃÇ
7. ĘŇÂ USB 1
ŕĘéą
8. ĘҵčÍǧ¨Ă (ĘҨŃÁľě
ŕÁŐÂ-ŕÁŐÂ) 3
ŕĘéą
9. ĘҵčÍǧ¨Ă (ĘҨŃÁľě
ĽŮé-ĽŮé) 2
ŕĘéą
10. ĘҵčÍǧ¨Ă (ĘҨŃÁľě ĽŮé-ŕÁŐÂ) 2
ŕĘéą
ÇÔ¸ŐˇŇĂ·´Ĺͧ
µÍą·Őč
1 ˇŇäǺ¤ŘÁ·ÔȷҧˇŇĂËÁŘą˘Í§ÁÍŕµÍĂě
1.
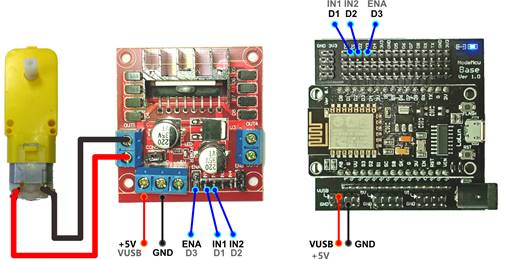
µčÍǧ¨Ă´Ń§ĂŮ»·Őč 9
2.
ŕ˘ŐÂąâ»ĂáˇĂÁ´Ń§·ŐčáĘ´§ăąâ¤é´ËąéŇ¶Ń´ä» ¨ŇˇąŃ鹨֧ÍŃ»âËŴŧ NodeMCU v.3 áĹéÇĘѧࡵ·ÔȷҧˇŇĂËÁŘą˘Í§ÁÍŕµÍĂě â´ÂËҡÁÍŕµÍĂěäÁčËÁŘąÍÂčҧµčÍŕą×čͧ
ŕą×čͧ¨ŇˇäżŕĹŐ駨ҡ USB äÁčŕľŐ§ľÍ ˇç˘ÍăËéăŞéÍĐá´ç»ŕµÍĂěĂčÇÁ㹡ŇèčŇÂäżä»ÂѧşÍĂ촢ѺÁÍŕµÍĂě
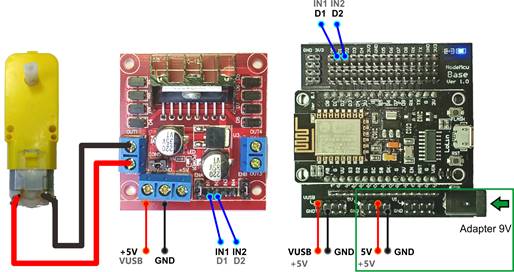
ĂŮ»·Őč
9 ˇŇĂŕŞ×čÍÁµčÍ
NodeMCU
v.3 ˇŃşşÍĂ촢ѺÁÍŕµÍĂěáĹĐÁÍŕµÍĂě俵ç
â´Â㹡ĂÍşĘŐčŕËĹŐčÂÁĘŐŕ˘ŐÂǤ×͡ŇõčÍĘŇÂ㹡óշŐčäżŕĹŐ駨ҡľÍĂěµ USB ąŃéąäÁčŕľŐ§ľÍ
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 |
// Control DC Motor via L298N by
NodeMCU ESP8266 int IN1 = D1; int IN2 = D2; void setup() { pinMode(IN1, OUTPUT); pinMode(IN2, OUTPUT); } void loop()
{ digitalWrite(IN1, HIGH); digitalWrite(IN2, LOW); } |
3.
áˇéä˘â»ĂáˇĂÁşĂĂ·Ń´·Őč 12
áĹĐ 13 â´ÂĘŃč§ăËé˘Ň IN1 ŕ»çąĹͨԡ LOW áĹĐ IN2 ŕ»çąĹͨԡ
HIGH ¨ŇˇąŃ鹨֧ÍŃ»âËĹ´â»ĂáˇĂÁăËÁč áĹéÇĘѧࡵˇŇĂËÁŘą˘Í§ÁÍŕµÍĂě
|
12 13 |
digitalWrite(IN1, LOW); digitalWrite(IN2, HIGH); |
µÍą·Őč
2 ˇŇäǺ¤ŘÁ¤ÇŇÁŕĂçÇÁÍŕµÍĂě
1.
µčÍǧ¨Ă´Ń§ĂŮ»·Őč 10
â´ÂŕÍҨŃÁŕ»ÍĂě·Őč˘Ň ENA Í͡ˇčÍą
2.
ŕ˘ŐÂąâ»ĂáˇĂÁ´Ń§·ŐčáĘ´§ăąâ¤é´ËąéŇ¶Ń´ä» ¨ŇˇąŃ鹨֧ÍŃ»âËŴŧ NodeMCU v.3 áĹéÇĘѧࡵ¤ÇŇÁŕĂçÇ㹡ŇĂËÁŘą˘Í§ÁÍŕµÍĂě
¨ŇˇˇŇĂ·´Ĺͧ㹢éÍ 2 ąŐé ¨ĐĘѧࡵä´éÇčŇ
ÁÍŕµÍĂě¨ĐĘč§ŕĘŐ§áËĹÁÍ͡ÁŇ㹢łĐ·ŐčÂѧäÁčËÁŘą
ŕą×čͧ¨Ňˇáç´ŃąáĹСĂĐáĘ·Őč¨čŇÂăËéˇŃşÁÍŕµÍĂěÂѧäÁčŕľŐ§ľÍ·Őč¨ĐŕÍŇŞąĐáçŕĘŐ´·ŇąĘ¶ÔµÂěăąâ¤Ă§ĘĂéҧ·Ň§ˇĹ
áĹĐŕÁ×čÍÁÍŕµÍĂěŕĂÔčÁËÁŘąáĹéÇ ˇç¨ĐËÁŘąŕĂçǢÖéąŕĂ×čÍ ć
áĹéÇËÂŘ´áĹĐŕĂÔčÁ¨Ö§ËÁŘąăËÁč µŇÁǧĂÍşˇŇ÷ӧҹ㹿ѧˇěŞŃą loop()
ĂŮ»·Őč
10
ˇŇĂŕŞ×čÍÁµčÍ NodeMCU
v.3 ˇŃşşÍĂ촢ѺÁÍŕµÍĂě
áĹĐÁÍŕµÍĂě俵çŕľ×čͤǺ¤ŘÁ¤ÇŇÁŕĂçÇ
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 |
// Control DC Motor via L298N by
NodeMCU ESP8266 int IN1 = D1; int IN2 = D2; int ENA = D3; void setup() { pinMode(IN1, OUTPUT); pinMode(IN2, OUTPUT); pinMode(ENA, OUTPUT); } void loop() { for (int speed=0;
speed<1024; speed++) { digitalWrite(IN1,
HIGH); digitalWrite(IN2,
LOW); analogWrite(ENA,speed); delay(10); } } |
áşş˝ÖˇËŃ´·éŇ¡ŇĂ·´Ĺͧ
¨§ŕ˘ŐÂąâ¤é´·Őč¤Çş¤ŘÁăËéÁÍŕµÍĂě¤čÍ ć
ŕĂÔčÁËÁŘąµŇÁŕ˘çÁąŇĚÔˇŇ ¨ŇˇËÂŘ´ąÔč§ä»ŕĂçÇ·ŐčĘŘ´ áĹéǤčÍ ć ËÂشŧ
(¨ŇˇŕĂçÇ·ŐčĘŘ´ä»ËÂŘ´ąÔč§) áĹéǨ֧ËÁŘą·Çąŕ˘çÁąŇĚԡҨҡËÂŘ´ąÔč§ä»ŕĂçÇ·ŐčĘŘ´
áĹéǤčÍ ć ËÂشŧ (¨ŇˇŕĂçÇ·ŐčĘŘ´ä»ËÂŘ´ąÔč§) â´ÂÁŐĹѡɳСŇĂŕ»ĹŐčÂąá»Ĺ§˘Í§¤čҤÇŇÁŕĂçÇáşşŕŞÔ§ŕĘ鹴ѧáĘ´§ăąĂŮ»·Őč
11
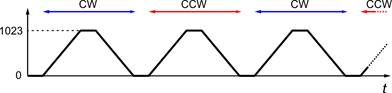
ĂŮ»·Őč
11
ĹѡɳСŇĂŕ»ĹŐčÂąá»Ĺ§˘Í§¤čҤÇŇÁŕĂçÇÁÍŕµÍĂě·ŐčˇÓËą´ăąáşş˝ÖˇËŃ´