ˇŇĂăŞé§ŇąâÁ´ŮĹŕ«ąŕ«ÍĂěµĂǨ¨ŃşˇŇĂŕ¤Ĺ×čÍąäËÇ
ŕ«ąŕ«ÍĂěµĂǨ¨ŃşˇŇĂŕ¤Ĺ×čÍąäËÇ
ˇŇõĂǨ¨ŃşˇŇĂŕ¤Ĺ×čÍąäËÇ·Őč¨ĐˇĹčŇǶ֧㹺·ąŐé
¤×͡ŇõĂǨ¨ŃşˇŇĂŕ¤Ĺ×čÍąäËǢͧÁąŘÉÂě´éÇÂŕ«ąŕ«ÍĂ쪹ԴäľâĂÍÔŕĹ硷ĂÔˇÍÔążĂŇŕĂ´ (pyroelectric
infrared sensor) ËĂ×ÍÁŐÍŐˇŞ×čÍËąÖč§ÇčŇŕ«ąŕ«ÍĂěÍÔążĂŇŕĂ´ŞąÔ´ľŇĘ«Ôż
(passive infrared sensor) áĹĐŕĂŐ¡ÂčÍ ć ÇčŇ
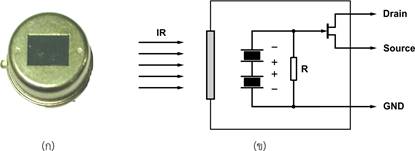
ľŐäÍÍŇĂěŕ«ąŕ«ÍĂě (PIR sensor) â´Âŕ«ąŕ«ÍĂěąŐéĘŇÁŇöá»Ĺ§¤Ĺ×čąáʧÍÔążĂŇŕĂ´ (infrared, IR) ·ŐčŕˇÔ´¨ŇˇˇŇĂáĽčĂѧĘըҡÇѵ¶Ř·ŐčÁŐÍŘłËŔŮÁÔĘ٧ˇÇčŇĘÔč§áÇ´ĹéÍÁăËéŕ»çąĘŃŇł·Ň§äżżéŇä´é
ĂŮ»·Őč 1(ˇ) áĘ´§ŔŇľ¶čŇ¢ͧૹŕ«ÍĂ쪹ԴąŐé
ľŐäÍÍŇĂěŕ«ąŕ«ÍĂěÁŐĘčÇą»ĂСͺŔŇÂăą·ŐčĘӤѤ×Í
ŔŇÂăąµŃÇŕ«ąŕ«ÍĂě¨ĐÁŐŞčͧĂŃş¤Ĺ×čąáʧÍÔążĂŇŕĂ´ĘͧŞčͧ (´ŮĂŮ»·Őč 1(˘)) «Öč§ŕ»ĂŐÂşä´éÇčŇŔŇÂăąÁŐŕ«ąŕ«ÍĂěĘͧµŃÇ·ŐčµčÍ͹ءĂÁˇŃąÍÂŮčŔŇÂăą
áĹĐÁŐǧ¨Ă·ĂŇą«ÔĘŕµÍĂě (ŕ¨ŕżµ) ÍÂŮč´éÇ ૹŕ«ÍĂě·ŐčăŞéąŐé¨ĐµĂǨ¨Ńş¤Ĺ×čąáʧÍÔążĂŇŕĂ´·Őčŕ»Ĺč§Í͡ÁҨҡĘÔč§ÁŐŞŐÇÔµ
ŕą×čͧ¨ŇˇĘÔ觷ŐčÁŐ¤ÇŇÁĂéÍą·ŘˇŞąÔ´¨Đŕ»Ĺč§ĂѧĘŐÍÔążĂŇŕĂ´Í͡ÁŇ ąŃ蹤×Í
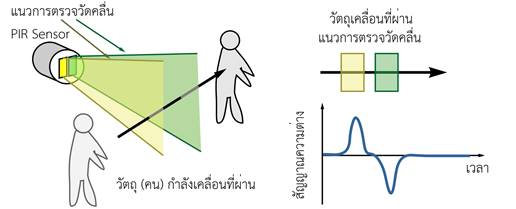
㹢łĐ·ŐčäÁčÁŐˇŇĂŕ¤Ĺ×čÍąäËÇ ŕ«ąŕ«ÍĂě·Ńé§ĘͧŞčͧ¨Đä´éĂŃşĘŃŇłľ×éąËĹѧ¨ŇˇĘÔ觢ͧµčҧ
ć ŕ·čҡѹ·ÓăËéäÁčÁŐ¤ÇŇÁµčҧ˘Í§ĘŃŇł¨Ňˇŕ«ąŕ«ÍĂě·Ńé§Ęͧ áµčŕÁ×čÍÁŐÇѵ¶Ř·Őčŕ»Ĺ觤Ĺ×čąáʧÍÔążĂŇŕĂ´ŕ¤Ĺ×čÍą·ŐčĽčŇąŕ«ąŕ«ÍĂěˇç¨ĐˇčÍăËéŕˇÔ´ĘŃŇł¤ÇŇÁµčҧ˘Öéą
ŕą×čͧ¨Ňˇŕ«ąŕ«ÍĂěµĂǨ¨ŃşĘŃŇł¨ŇˇÇѵ¶Řä´éäÁčŕ·čҡѹ㹢łĐ·ŐčÇѵ¶Řŕ¤Ĺ×čÍą·Őč â´ÂĘŃŇłąŐé¨Đŕ»çą¤čҺǡáĹĐĹşĘĹŃşˇŃąµŇÁĹÓ´ŃşŕÇĹŇ
ĂŮ»·Őč 2
áĘ´§ĹѡɳСŇĂŕ¤Ĺ×čÍą·ŐčĽčŇą˘Í§Çѵ¶ŘáĹĐĹѡɳĐĘŃŇł·Őčä´éĂŃş
â´ÂŕÁ×čÍä´éĂŃşĘŃŇłáĹéÇ Ç§¨Ă»ĂĐÁÇżšç¨ĐŕÍҤčŇĘ٧ĘŘ´˘Í§ĘŃŇłÁŇŕ»ĂŐÂşŕ·ŐÂşˇŃş¤čŇŕ·ĂĘâÎĹ´ě
(threshold value) ăąĹÓ´Ńş¶Ń´ä» ŕľ×čͺ觺͡ÇčŇÁŐˇŇĂŕ¤Ĺ×čÍą·Őč˘Í§Çѵ¶ŘËĂ×ÍäÁč
ĂŮ»·Őč
1 (ˇ) ŔŇľ¶čŇÂáĹĐ (˘) ĹѡɳĐǧ¨ĂŔŇÂ㹢ͧľŐäÍÍŇĂěŕ«ąŕ«ÍĂě
ĂŮ»·Őč
2
ËĹѡˇŇĂáĹĐĘŃŇł¨ŇˇˇŇõĂǨ¨ŃşˇŇĂŕ¤Ĺ×čÍąäËÇ´éÇÂľŐäÍÍŇĂěŕ«ąŕ«ÍĂě
㹡ŇõĂǨ¨ŃşˇŇĂŕ¤Ĺ×čÍąäËÇąŃéą ŕĂŇÁѡ¨ĐµéͧˇŇĂăËéĘŃŇł¤Ĺ×čąáʧÍÔążĂŇŕĂ´ÁŐĹѡɳĐŕ»çąĹÓŕ˘éŇÁŇÂѧૹŕ«ÍĂě
(ŕËÁ×ÍąµŃǵĂǨ¨ŃşáĘ§ŞąÔ´Í×čą ć) ´Ń§ąŃéą ŕ«ąŕ«ÍĂěąŐé¨Ö§Áѡ¨ĐÁŇľĂéÍÁˇŃşŕĹą«ěĘÓËĂŃşĂÇÁ¤Ĺ×čąáʧÍÔążĂŇŕĂ´
áĹĐ㹷ҧ˘éÍÁŮĹ«Öč§ŕ»çąĘŃŇłäżżéŇąŃéą ŕĂŇÁѡ¨ĐµéͧˇŇĂŕľŐ§˘éÍÁŮĹ´Ô¨Ô·ŃĹ·Őčşč§şÍˇÇčŇ
ÁŐˇŇĂŕ¤Ĺ×čÍąäËÇŕˇÔ´˘ÖéąËĂ×ÍäÁč ´Ń§ąŃéą
ľŐäÍÍŇĂěŕ«ąŕ«ÍĂě¨Ö§ÁŐˇŇĂăŞé§ŇąăąĹѡɳĐŕ»çąâÁ´ŮĹ·ŐčÁŇľĂéÍÁˇŃşŕĹą«ě·ŐčµÔ´µŃ駴éҹ˹éŇáĹĐǧ¨Ă´Ô¨Ô·ŃĹ·ŐčÍÂŮč´éŇąËĹѧáĹĐ·Őč·ÓËąéŇ·Őč»ĂĐÁÇĹĘŃŇłăąŕş×éͧµéąŕľ×čÍĘ觵čÍăËéáˇčäÁâ¤Ă¤Íąâ·ĂĹŕĹÍĂě
ĂŮ»·Őč 3
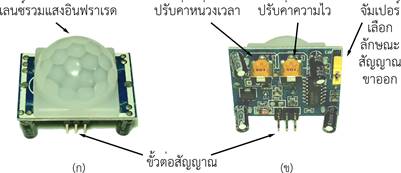
áĘ´§ĹѡɳТͧľŐäÍÍŇĂěŕ«ąŕ«ÍĂěâÁ´ŮĹ·ŐčÁբҷŃčÇä»ăą·éͧµĹŇ´
ĂŮ»·Őč
3
ľŐäÍÍŇĂěŕ«ąŕ«ÍĂěâÁ´ŮĹ (ˇ) ´éҹ˹éŇ áĹĐ (˘) ´éŇąËĹѧ
ľŐäÍÍŇĂěŕ«ąŕ«ÍĂěâÁ´ŮĹąŐé¨ĐĂŃşäżŕĹŐé§ (VCC áĹĐ GND) áĹĐĘč§ĘŃŇł˘ŇÍ͡ (Output Signal) áşş´Ô¨Ô·ŃĹ ·Őčşč§şÍˇÇčҵĂǨľşˇŇĂŕ¤Ĺ×čÍąäËÇËĂ×ÍäÁčÍÍˇä» ăąâÁ´ŮźҧĂŘčą (ŕŞčąĂŘčą HC-SR501 ´Ń§áĘ´§ăąĂŮ»·Őč 3) ¨ĐÁŐµŃǵéŇą·Ňą»ĂŃş¤čŇä´éĘÓËĂŃş»ĂŃş¤čҤÇŇÁäǢͧˇŇõĂǨ¨Ńş (sensitivity) «Ö觡ç¤×͡ŇĂ»ĂŃş¤čŇŕ·ĂĘâÎĹ´ě áĹĐ»ĂŃş¤čŇĂĐÂĐŕÇĹҢͧľŃĹĘě (time
duration) ĘŃŇł´Ô¨Ô·ŃĹ·Őčşč§şÍˇÇčҵĂǨľşˇŇĂŕ¤Ĺ×čÍąäËÇáĹéÇ ĂŮ»·Őč
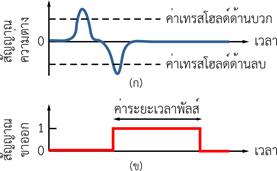
4 áĘ´§ĹѡɳĐĘŃŇł¨Ňˇŕ«ąŕ«ÍĂěŕ·ŐÂşˇŃşĘŃŇłÍéҧÍÔ§áĹĐĘŃŇł´Ô¨Ô·ŃŢŇÍ͡«Öč§ÁŐ¤čŇĂĐÂĐŕÇĹŇľŃĹĘě·Őč»ĂŃşŕ»ĹŐčÂąä´é
ĘÓËĂŃş¨ŃÁŕ»ÍĂě·ŐčăŞé㹡ŇĂŕĹ×͡ĹѡɳТͧĘŃŇł˘ŇÍ͡ąŃéą
(´ŮĂŮ»·Őč 3(˘)) ¨Đŕ»çąˇŇĂŕĹ×͡ăËéˇŇõĂǨ¨ŃşˇŇĂŕ¤Ĺ×čÍą·ŐčÁŐ¤ÇŇÁµčÍŕą×čͧËĂ×ÍäÁč
ąŃ蹤×ͨŃÁŕ»ÍĂěąŐéĘŇÁŇöˇÓËą´ăËé¤čŇĂĐÂĐŕÇĹŇľŃĹĘěĘŇÁŇöŕľÔčÁ˘Öéą
ËҡÁŐˇŇĂŕ¤Ĺ×čÍąäËÇÍÂčҧµčÍŕą×čͧ â´ÂˇŇĂ૵ăąĂŮ»·Őč 3(˘)
ąŃéąŕ»çąĹѡɳзŐčĘŃŇłŕ»çąľŃĹĘěŕ´ŐčÂÇ ÁŐĂĐÂĐŕÇĹҤ§·Őč
µŇÁ¤čŇ·Őč»ĂŃş´éǤčҵŃǵéŇą·Ňą»ĂŃş¤čŇËąčǧŕÇĹŇ
«Öč§ËҡŕĹ×čÍą¨ŃÁŕ»ÍĂěąŐéÁŇ·Őč¤ŮčĹčҧ
¨Đŕ»çąˇŇáÓËą´ăËéľŃĹĘěąŐéĘŇÁŇöÂŇǹҹ˘Öéąä´é
Ëҡૹŕ«ÍĂěÂѧ¤§µĂǨľşˇŇĂŕ¤Ĺ×čÍąäËǵčÍä» (ËĹѧ¨ŇˇľşăąˇŇĂŕ¤Ĺ×čÍąäËǤĂŃé§áááĹéÇ)
ĂŮ»·Őč
4 ĹѡɳР(ˇ) ĘŃŇł¤ÇŇÁµčҧŕ·ŐÂşˇŃş¤čŇŕ·ĂĘâÎĹ´ě áĹĐ
(˘) ĘŃŇł˘ŇÍ͡˘Í§âÁ´ŮĹŕ«ąŕ«ÍĂěµĂǨ¨ŃşˇŇĂŕ¤Ĺ×čÍąäËÇ
ˇŇĂŕ˘ŐÂąâ»ĂáˇĂÁĂŃş¤čŇ´Ô¨Ô·ŃĹ
¤ÓĘŃč§ăąˇŇĂăŞé§ŇąľŐäÍÍŇĂěŕ«ąŕ«ÍĂěâÁ´ŮĹăą
ŔŇÉŇ Arduino ¤×Í ż§ˇŞŃąÍÔąľŘµáşş´Ô¨Ô·ŃĹ (Digital Input)
«Öč§ÁտѧˇěŞŃą·Őčµéͧ·ĂŇş 2 żŃ§ˇěŞŃą ¤×Í pinMode(pin,
mode) áĹĐ ¤ÓĘŃč§ digitalRead(pin)
໹¤íŇĘŃč§ăËéÍčҹʶҹзҧĹͨԡ˘Í§˘Ň·Őčµč͡Ѻૹŕ«ÍĂě
â´Â¤čŇ·ŐčĘ觤׹ÁҤ×Í ĹͨԡĘ٧ (HIGH ËĂ×Í ¤čҵŃÇŕŢ “1”)
ËĂ×Í ĹͨԡµčÓ (LOW ËĂ×Í ¤čҵŃÇŕŢ “0”) ŕ·čŇąŃéą ˘Ö鹡ѺʶҹСŇõĂǨ¨ŃşˇŇĂŕ¤Ĺ×čÍąäËǢͧૹŕ«ÍĂě
â´ÂˇŇĂăŞé§Ňą¤ÓĘŃ觹Őé ĘŇÁŇöČÖˇÉŇŕľÔčÁŕµÔÁä´é¨Ňˇş·ŕĘĂÔÁ·Őč 1 ˇŇĂăŞé§ŇąĘÇÔµŞě
ˇŇĂ·´ĹͧÍčŇą¤čҨҡľŐäÍÍŇĂěŕ«ąŕ«ÍĂěâÁ´ŮĹ
Çѵ¶Ř»ĂĐʧ¤ě
1.
ĘŇÁŇöµÍşÍĂě´ NodeMCU v.3 ˇŃşľŐäÍÍŇĂěŕ«ąŕ«ÍĂěâÁ´ŮĹä´
2.
ĘŇÁŇöŕ˘ŐÂąâ»ĂáˇĂÁăËé NodeMCU ĂŃş¤čҨҡૹŕ«ÍĂěâÁ´ŮĹáĹĐáĘ´§ĽĹĽčŇąľÍĂěµÍąŘˇĂÁä´
3.
ĘŇÁŇö»ĂŃşŕ»ĹŐčÂą¤čҤÇŇÁäÇ㹡ŇõĂǨ¨ŃşˇŇĂŕ¤Ĺ×čÍąäËÇ
¤čŇĂĐÂĐŕÇĹŇľŃĹĘě áĹĐâËÁ´ˇŇĂĘč§ĘŃŇłÍ͡˘Í§ľŐäÍÍŇĂěŕ«ąŕ«ÍĂěâÁ´ŮĹä´é
ÍŘ»ˇĂłě·ŐčăŞé㹡ŇĂ·´Ĺͧ
1. ŕ¤ĂŐčͧ¤ÍÁľÔÇŕµÍĂě·ŐčÁŐĂĐşş»ŻÔşŃµÔˇŇĂ
Windows
(µŃé§áµč Windows 7 ˘Öéąä»)
ľĂéÍÁµÔ´µŃé§â»ĂáˇĂÁ Arduino IDE 1.8.8 IoT 1
ŕ¤Ă×čͧ
2. NodeMCU v.3 1
şÍĂě´
3. NodeMCU Base
Ver 1.0 1
şÍĂě´
4. ľŐäÍÍŇĂěŕ«ąŕ«ÍĂěâÁ´ŮĹ HC-SR501 1 şÍĂě´
5. şÍĂě´ĂŐŕĹÂ쪹Դ
4 Şčͧ 1 şÍĂě´
6. ĘŇÂ USB 1
ŕĘéą
7. ĘҵčÍǧ¨Ă
(ĘҨŃÁľě ŕÁŐÂ-ŕÁŐÂ) 6 ŕĘéą
ÇÔ¸ŐˇŇĂ·´Ĺͧ
1.
µÍǧ¨ĂµŇÁĂŮ»·Őč 5
2.
ŕ˘ŐÂąâ¤é´˘éҧĹčҧąŐéáĹéÇÍŃ»âËŴŧ NodeMCU v.3 ŕľ×čÍáĘ´§ĽĹˇŇõĂǨ¨ŃşˇŇĂŕ¤Ĺ×čÍąäËÇĽčŇąľÍĂěµÍąŘˇĂÁ
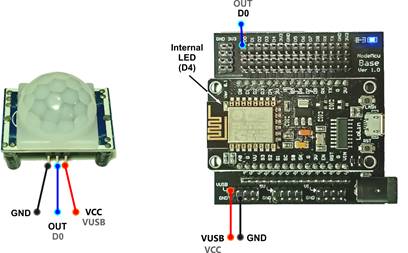
ĂŮ»·Őč
5 ˇŇĂŕŞ×čÍÁµčÍ
NodeMCU
v.3 ˇŃşşÍĂě´ľŐäÍÍŇĂěŕ«ąŕ«ÍĂěâÁ´ŮĹ
3.
ŕ»Ô´ Serial Monitor (Ctrl+Shift+M)
ËĂ×Í Serial Plotter (Ctrl+Shift+L)
áĹĐĘѧࡵáÍĹÍŐ´ŐşąşÍĂě´
â´ÂĘѧࡵĽĹ·ŐčŕˇÔ´˘ÖéąŕÁ×čÍÁŐˇŇĂŕ¤Ĺ×čÍąäËÇĽčŇąâÁ´ŮĹŕ«ąŕ«ÍĂě
4.
·ÓˇŇĂ·´Ĺͧ»ĂŃşµŃǵéŇą·Ňą»ĂŃş¤čŇä´é·ŐčÍÂŮčşąâÁ´ŮĹ
áĹĐĘѧࡵˇŇĂŕ»ĹŐčÂąá»Ĺ§˘Í§ĽĹ·Őčä´éĂŃş ĂŮ»·Őč 5 áĘ´§µŃÇÍÂčҧĽĹˇŇĂ·´Ĺͧ·ŐčĘѧࡵä´é
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 |
// Detect Motion with PIR Sensor Module // by NodeMCU ESP8266 #define ON LOW // LED is
active low. #define OFF HIGH int PIR_PIN = D0; int LED_PIN = D4; // Internal LED void setup() { Serial.begin(9600); pinMode(PIR_PIN, INPUT); pinMode(LED_PIN, OUTPUT); } void loop() { int st; // st = state
of PIR_Signal st
= digitalRead(PIR_PIN); if(st == HIGH) { Serial.println(1); digitalWrite(LED_PIN,
ON); } else { Serial.println(0); digitalWrite(LED_PIN,
OFF); } delay(200); } |
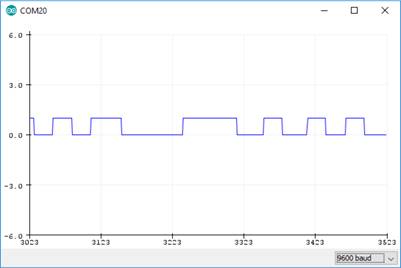
ĂŮ»·Őč 6 µŃÇÍÂčҧĽĹˇŇĂ·´Ĺͧ·ŐčĘѧࡵä´éĽčŇą
Serial
Plotter
áşş˝ÖˇËŃ´·éŇ¡ŇĂ·´Ĺͧ
㹡ŇĂ·´Ĺͧ ËҡŕĂҵéͧˇŇĂăËéĘŃŇł¨ŇˇľŐäÍÍŇĂěŕ«ąŕ«ÍĂě
ä»ĘŃ觡Ň÷ӧҹ˘Í§ĂŐŕĹÂěŕ»Ô´»Ô´äż·ŐčÁŐˇŇõčÍǧ¨Ă´Ń§ĂŮ»·Őč 7 ¨§ŕ˘ŐÂąâ»ĂáˇĂÁ¤ÓĘŃč§ŕľÔčÁŕµÔÁăąĘčÇąąŐé
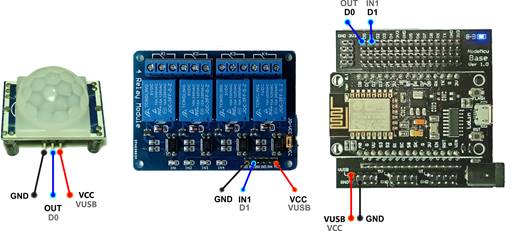
ĂŮ»·Őč
7 ˇŇĂŕŞ×čÍÁµčÍ
NodeMCU
v.3 ˇŃşşÍĂě´ľŐäÍÍŇĂěŕ«ąŕ«ÍĂěâÁ´ŮĹ áĹĐ şÍĂě´ĂŐŕĹÂě