ˇŇĂĘ×čÍĘŇĂĽčŇąľÍĂěµÍąŘˇĂÁ
ÁҵðҹˇŇĂĘ×čÍĘŇĂ
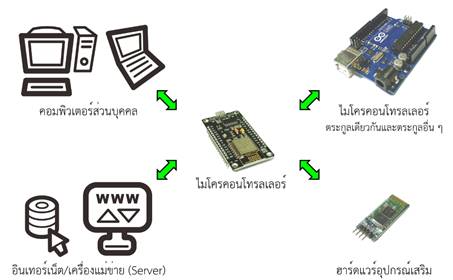
㹻Ѩ¨ŘşŃąÁŐˇŇĂąÓäÁâ¤Ă¤Íąâ·ĂĹŕĹÍĂěä»ŕŞ×čÍÁµč͡ѺÍŘ»ˇĂłěµčҧ
ć ÁҡÁŇ (´ŮĂŮ»·Őč 5.1) â´ÂˇŇĂŕŞ×čÍÁµčÍąŃ鹡çÁŐÍÂŮč´éÇ¡ѹËĹŇÂĂٻẺ
â´ÂˇŇĂŕŞ×čÍÁµčÍẺ˹Ö觷Őčä´éĂŃş¤ÇŇÁąÔÂÁˇç¤×͡ŇĂŕŞ×čÍÁµčÍẺ͹ءĂÁ (Serial
Communication) ˇŇĂ·Ó¤ÇŇÁŕ˘éŇă¨ŕˇŐčÂǡѺˇŇĂĘ×čÍĘŇâéÍÁŮĹẺ͹ءĂÁ
ŕĂҨÓŕ»çąµéͧ·ĂŇşČŃľ·ě·ŐčŕˇŐčÂǢéͧ´Ń§ąŐé
· TTL
(Transistor-Transistor Logic)
· UART
(Universal Asynchronous Receiver Transmitter)
· USB (Universal Serial Bus)
ĂŮ»·Őč
5.1
µŃÇÍÂčҧˇŇĂĘ×čÍĘŇĂẺ͹ءĂÁĂĐËÇčҧäÁâ¤Ă¤Íąâ·ĂĹŕĹÍĂěˇŃşÍŘ»ˇĂłěÍ×čą ć
ĂĐ´ŃşĘŃŇł
TTL
(Transistor-Transistor Logic)
TTL
ŕ»çąĂĐ´Ńşáç´Ńą·Őč¶ŮˇˇÓËą´˘ÖéąăąÂؤáá ć
˘Í§ˇŇĂŕŞ×čÍÁµčÍĘ×čÍĘŇĂŕľ×čÍăŞé㹡ŇáÓËą´ˇŇĂŕŞ×čÍÁµčÍĂĐËÇčҧ˘Ň˘Í§·ĂŇą«ÔĘŕµÍĂě·ŐčÍÂŮčŔŇÂăąäÍ«Ő
(ǧ¨ĂĂÇÁ, Integrated Circuit, IC) ĂĐ´ŃşĘŃŇł TTL ¨ĐăŞéĂĐ´Ńşáç´Ńą ÍÂŮč·Őč 0 ¶Ö§ +5 V (ĂŮ»·Őč 5.2) áµč㹻Ѩ¨ŘşŃąÁŐÍŘ»ˇĂłěËĹŇÂÍÂčҧáĹĐäͫըӹǹÁҡ·Őč·Ó§ŇąăąŞčǧĂĐ´Ńşáç´Ńą
0 ¶Ö§ 3.3 V «Öč§ŕĂŐ¡áç´ŃąĂĐ´ŃşąŐéÇčŇĂĐ´Ńşáç´ŃąµčÓ (Low
Voltage TTL, LVTTL) «Ö觼ŮéăŞé¤ÇõĂǨĘÍş¨ŇˇáĽčą˘éÍÁŮĹ (Datasheet)
˘Í§ÍŘ»ˇĂłě·Őč¨ĐąÓÁŇăŞéŕĘŐ¡čÍąÇčŇăŞéˇŃşĂĐ´Ńşáç´Ńąă´ ŕľĂŇĐËҡăŞéĽÔ´»ĂĐŕŔ·¨Đ·ÓăËéÍŘ»ˇĂłěŕĘŐÂËŇÂ
´Ń§ąŃéąĘÓËĂŃş NodeMCU ·ŐčăŞéĂĐ´Ńşáç´Ńą 3.3 V 㹡ŇĂĘ觢éÍÁŮĹ
ŕĂҨеéͧµĂǨĘÍşÍŘ»ˇĂłě·ŐčąÓÁҵčÍľčǧÇčŇăŞéˇŃşĂĐ´Ńşáç´Ńą 3.3 V ä´éËĂ×ÍäÁč
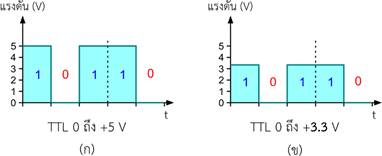
ĂŮ»·Őč 5.2 ĂĐ´Ńşáç´Ńą TTL (ˇ) áşş´Ńé§ŕ´ÔÁ áĹĐ (˘)
áşşáç´ŃąµčÓ
UART
(Universal Asynchronous Receiver-Transmitter)
UART
ËÁҶ֧ÍŘ»ˇĂłě·Őč·ÓËąéŇ·ŐčĂŃşáĹĐĘ觢éÍÁŮĹáşşÍĐ«Ô§â¤ĂąŃĘ (asyn-chronous) «Öč§ÁѡăŞéˇŃşˇŇĂĘ×čÍĘŇĂẺ͹ءĂÁ
â´ÂˇŇĂĘ×čÍĘŇĂẺ͹ءĂÁÍҨ¨Đáşč§ä´éŕ»çą 2 áşş ¤×Í
1)
«Ô§â¤ĂąŃĘ
(Synchronous)
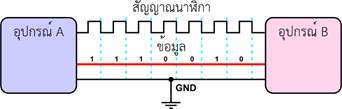
ŕ»çąˇŇĂĘ觢éÍÁŮĹŕ»çąşĹç͡ ¤ĂŃé§ĹĐËĹŇÂäşµě
â´Â¨ĐÁŐĘŃŇłąŇĚÔˇŇ (CLK,
CLocK) ·ŐčŞčÇÂ㹡Ň÷ӧҹ˘Í§µŃÇĘč§áĹеŃÇĂŃşĘÍ´¤ĹéͧˇŃą
â´ÂĘŃŇł·ŐčĘč§ÍҨ¨Đ¶Ůˇŕ˘éŇĂËŃĘĂčÇÁˇŃąÍÂŮč㹪ش˘éÍÁŮĹąŃéąËĂ×Íá¡ÍÔĘĂĐÍ͡ŕ»çąĘҵčҧËҡˇçä´é
ĂŮ»·Őč 5.3 áĘ´§ĹѡɳĐáąÇ¤Ô´ľ×鹰ҹ㹡ŇĂĘ觢éÍÁŮĹáşş«Ô§â¤ĂąŃĘ
ĂŮ»·Őč
5.3
ˇŇĂĘ×čÍĘŇĂáşş«Ô§â¤ĂąŃĘ
2)
ÍĐ«Ô§â¤ĂąŃĘ
(Asynchronous)
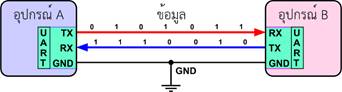
ˇŇĂĘ觢éÍÁŮĹáşşÍĐ«Ô§â¤ĂąŃĘŕ»çąˇŇĂĘ×čÍĘŇĂáşş·ŐčăŞéÁҡ㹡ŇĂĘ×čÍĘŇĂăąäÁâ¤Ă¤Íąâ·ĂĹŕĹÍĂě
ĂٻẺˇŇĂĘ×čÍĘŇèĐŕ»çąˇŇĂĂŃşĘ觢éÍÁŮŤĂŃé§ĹĐ 1 äşµě ´Ń§ĂŮ»·Őč 5.4
â´ÂÁŐĂٻẺ˘Í§˘éÍÁŮŴѧáĘ´§ăąĂŮ»·Őč 5.5
ĂŮ»·Őč
5.4
ˇŇĂĘ×čÍĘŇĂáşşÍĐ«Ô§â¤ĂąŃĘ

ĂŮ»·Őč
5.5
ĂٻẺ˘éÍÁŮĹ·ŐčăŞé㹡ŇĂĘ×čÍĘŇĂ͹ءĂÁáşşÍĐ«Ô§â¤ĂąŃĘ
ăąĂŮ»·Őč 5.5 ˘éÍÁŮŨлĂСͺ´éÇÂ
-
şÔµŕĂÔčÁµéą (Start Bit) şÍˇ¨Ř´ŕĂÔčÁµéą˘éÍÁŮĹ
ÁŐ˘ąŇ´ 1 şÔµ
-
şÔµ˘éÍÁŮĹ (Data Bit) ¤×ͤčҢéÍÁŮĹÁŐä´éĂĐËÇčҧ
5 ¶Ö§ 8 şÔµ
-
ľŇĂÔµŐéşÔµ (Parity Bit) ¤×ÍşÔµ·ŐčăŞéĘÓËĂŃşµĂǨĘÍş¤ÇŇÁĽÔ´ľĹŇ´˘Í§˘éÍÁŮĹ
ÍҨäÁčÁŐËĂ×ÍÁŐ 1 şÔµ
- şÔµËÂŘ´ (Stop Bit)
şÔµ·ŐčşÍˇ¨Ř´ĘÔéąĘŘ´˘éÍÁŮĹ ÁŐä´é 1, 1.5 ËĂ×Í 2 şÔµ
USB
(Universal Serial Bus)
USB
ŕ»çąÁҵðҹˇŇĂŕŞ×čÍÁµčÍĘÓËĂŃşˇŇĂĂŃş-Ę觢éÍÁŮĹẺ͹ءĂÁĘÓËĂŃş¤ÍÁľÔÇŕµÍĂěáĹĐÍŘ»ˇĂłěµčÍľčǧµčҧ
ć ăąĂĐÂĐĘŃéą ć äÁčŕˇÔą 2-5 ŕÁµĂ â´Â USB ä´é¶ŮˇŕĂÔčÁąÓÁŇăŞé¤ĂŃé§áá㹻Ő
¤.Č. 1996 (ŕĂŐ¡ USB 1.0) áĹĐä´éÁŐˇŇþѲąŇµčÍŕą×čͧÁŇ
â´ÂŕąéąˇŇþѲąŇ´éŇą¤ÇŇÁŕĂçÇ㹡ŇĂĘ觢éÍÁŮĹ »Ń¨¨ŘşŃą Áҵðҹ USB ·ŐčăŞéÍÂčҧáľĂčËĹŇ ¨Đŕ»çą USB 2.0 áĹĐ USB 3.x (x = 0, 1 ËĂ×Í 2) â´Â USB 2 ¨ĐÁŐ¤ÇŇÁŕĂçÇĘ٧Ęش㹡ŇĂĘ觢éÍÁŮĹÍÂŮč·Őč
480 Mbit/s áĹĐľÍĂěµ USB 3
¶ŮˇÍ͡ẺÁŇăËéÁŐĹѡɳĐËąéҵҤĹéŇ¡Ѻ USB 2 ŕľ×čÍăËéŕĂŇĘŇÁŇöăŞé§ŇąÍŘ»ˇĂłě·ŐčăŞé
USB 2 ĂčÇÁˇŃşľÍĂěµ USB 3 ä´é â´Â USB
3 ÁŐ¤ÇŇÁŕĂçÇĘ٧ĘŘ´Ę٧¶Ö§ 10 Gbit/s (USB
3.2) áĹĐŕĂŇĘŇÁŇöĘѧࡵľÍĂěµ USB 3 ä´é§čŇÂ
¨ŇˇĘբͧ᡹ľĹŇʵԡŔŇÂ㹤×Í USB 3.0 ¨ĐăŞé᡹´éŇąăąĘŐżéŇ
ĂŮ»·Őč 5.6 áĘ´§ŔŇľËŃǵčÍ USB 2 áşşÁҵðҹ Type A áĹĐáşşäÁâ¤Ă B «Ö觾ÍĂěµáşşäÁâ¤Ă B ąŐé ¶ŮˇąÓÁŇăŞéăąşÍĂě´ NodeMCU
ĘŇ USB ·ŃčÇä»
¨Đ»ĂСͺ´éÇÂĘŇ 4 ŕĘéą ¤×Í áç´ŃąäżµĂ§ +5 V, Data–, Data+ áĹĐ
ˇĂŇÇ´ě â´Â˘éÍÁŮŨĐĘč§áşşÍąŘˇĂÁĽčŇąĘŇ Data– áĹĐ
Data+ ŕ·čŇąŃéą ĘÓËĂŃşáç´ŃąäżµĂ§ +5 V ¨ĐĘŇÁŇöąÓÁŇăŞéĘ觾Ĺѧ§ŇąäżżéŇä´é´éÇÂ
â´ÂĘ觡ĂĐáĘä´éĘ٧ĘŘ´ 0.5 A ĘÓËĂŃş USB 2 áĹĐ 0.9 A ĘÓËĂŃş USB 3 ´Ń§ąŃéąăąˇŇĂăŞé§ŇąľÍĂěµ
USB ŕ»çąáËĹ觾Ĺѧ§ŇąăËéˇŃşäÁâ¤Ă¤Íąâ·ĂĹŕĹÍĂě
ĽŮéăŞé¨Đµéͧ¤ÓąÖ§¶Ö§˘éͨӡѴ´éŇąˇŇèčŇ¡ĂĐáĘąŐé´éÇÂ
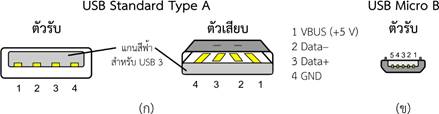
ĂŮ»·Őč
5.6 ĹѡɳТͧľÍĂěµ USB áşş (ˇ) Áҵðҹ Type A áĹĐ (˘)
µŃÇĂŃşáşşäÁâ¤Ă B
ÍѵĂҡŇĂĘ觢éÍÁŮĹ
ÍѵĂҡŇĂĘ觢éÍÁŮĹËĂ×Í şÍ´ŕĂ· (Baud Rate) ¤×ͤÇŇÁŕĂçǢͧˇŇĂĂŃş-Ę觢éÍÁŮĹ ŕ»çą¨ÓąÇąşÔµµčÍÇÔąŇ·Ő (bit per
second, bps) ŕŞčą 300, 1200, 2400, 4800, 9600,
19200, 38400, 57600, 74880, 115200 bps ŕ»çąµéą ˇŇĂŕĹ×͡ÍѵĂҡŇĂĘ觢éÍÁŮŢÖéąÍÂŮčˇŃş ŞąÔ´˘Í§ĘŇÂĘŃŇł, ĂĐÂзҧ áĹĐ»ĂÔÁŇłĘŃҳúˇÇą â´ÂˇŇĂĘ觢éÍÁŮĹĂĐËÇčҧäÁâ¤Ă¤Íąâ·ĂĹŕĹÍĂěáĹĐÍŘ»ˇĂłěÍ×čą
ć ąŃéą ¨Đ·Óä´éˇçµčÍŕÁ×čÍŕĂҡÓËą´ăËéÍѵĂҡŇĂĘ觢éÍÁŮĹÁŐ¤čҵçˇŃąŕ·čŇąŃéą
äÍ«ŐŕşÍĂě
CH340
㹡ŇĂá»Ĺ§˘éÍÁŮĹ·ŐčĂŃş-Ę觼čŇąľÍĂěµ USB ąŃéą NodeMCU (ESP8266)
¨ĐăŞéäÍ«ŐŕşÍĂě CH340 㹡ŇĂá»Ĺ§ĂĐ´ŃşĘŃŇłáç´Ńą
«Ö觺ҧ¤ĂŃ駨ĐŕĂŐ¡ÇčŇ USB-UART Interface IC â´Â㹡ŇĂăŞé§ŇąŞÔ»ąŐé
ŕĂŇÍҨµéͧŧä´ĂŕÇÍĂěăËéˇŃşĂĐşş»ŻÔşŃµÔˇŇĂÇÔąâ´ÇěˇčÍą
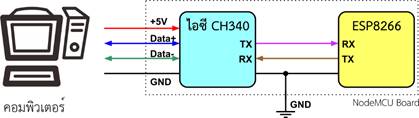
ĂŮ»·Őč
5.7
ˇŇĂŕŞ×čÍÁµčÍĂĐËÇčҧ¤ÍÁľÔÇŕµÍĂě (ĂĐ´ŃşĘŃŇł USB)
áĹĐ NodeMCU (ĂĐ´ŃşĘŃŇł LVTTL) ĽčŇą CH340
ˇŇĂŕ˘ŐÂąâ»ĂáˇĂÁµÔ´µčÍĘ×čÍĘŇĂ
㹡ŇĂĘ×čÍĘŇĂẺ͹ءĂÁ
ĂĐËÇčҧ NodeMCU
áĹФÍÁľÔÇŕµÍĂě ŕĂŇĘŇÁŇö·Óä´éâ´ÂˇŇĂŕŞ×čÍÁµčÍĽčŇąľÍĂěµ USB ´Ń§·ŐčŕĂŇä´é·´ĹͧˇŃąä»áĹéÇăąş··Őč 3 áĹĐ 4 ĘÓËĂŃşżŃ§ˇěŞŃąăąŔŇÉŇ Arduino
·ŐčăŞé㹡ŇĂĘ×čÍĘŇĂẺ͹ءĂÁąŐé ¨ĐÍÂŮčŔŇÂăąÇѵ¶ŘŞ×čÍ Serial áĹĐÁմѧąŐé
·
żŃ§ˇěŞŃąˇÓËą´ Buad
rate
-
Serial.begin(int baud)
â´Â
baud
¤×Í ÍѵĂŇŕĂçÇ·ŐčăŞé㹡ŇĂĘ×čÍĘŇĂ ÁŐ¤čŇ·ŐčăŞéşčͤ×Í 9600 áĹĐ 115200
·
żŃ§ˇěŞŃąµĂǨĘÍş˘éÍÁŮĹ·ŐčĘč§ÁŇÂѧľÍĂěµÍąŘˇĂÁ
-
Serial.available()
żŃ§ˇěŞŃąąŐé¨ĐĘ觤čҤ׹ŕ»çą¨ÓąÇąäşµě˘Í§˘éÍÁŮĹ
(ŕ»çą¤čҨӹǹŕµçÁ) ·ŐčĘ觼čŇąľÍĂěµÍąŘˇĂÁÁŇÂѧ´éŇąĂŃş
·
żŃ§ˇěŞŃąÍčŇą¤čҨҡľÍĂěµÍąŘˇĂÁ
-
Serial.read()
żŃ§ˇěŞŃąąŐé¨ĐĘ觤čҤ׹ŕ»çą˘éÍÁŮĹ·ŐčĘč§ÁŇÂѧ´éŇąĂŃş
·
żŃ§ˇěŞŃąĘ觢éÍÁŮĹÍ͡ä»ÂѧľÍĂěµÍąŘˇĂÁ
-
Serial.print(data), Serial.write(data) áĹĐ Serial.println(data)
żŃ§ˇěŞŃąąŐé¨ĐĘ觤čŇăËéáˇčľÍĂěµÍąŘˇĂÁâ´Â
Serial.print
¨ĐĘč§ĂËŃʵŃÇÍѡÉĂáşşáÍĘˇŐ (ASCII)
«Öč§ĘŇÁŇöÍčŇą·Ó¤ÇŇÁŕ˘éŇă¨ä´é§čŇ Serial.write Áѡ¨ĐăŞéĘ觤čŇäşąŇĂŐ
áĹĐ Serial.println ¨ĐŕËÁ×ÍąˇŃąˇŃş Serial.print áµč¨ĐÁŐˇŇĂŕľÔčÁµŃÇÍѡ˘ĂТÖéąşĂĂ·Ń´ăËÁč (newline character, ‘\n’) ËĹѧĘ觤čҵŃÇÍѡÉõŇÁ¤ÓĘŃ觹ŐéŕĘĂç¨
ˇŇĂ·´ĹͧĘ×čÍĘŇĂĽčŇąľÍĂěµÍąŘˇĂÁ
Çѵ¶Ř»ĂĐʧ¤ě
1.
ĘŇÁŇöŕ˘ŐÂąâ»ĂáˇĂÁăËé NodeMCU Ę觤čŇä»áĘ´§ĽĹşą¤ÍÁľÔÇŕµÍĂěä´é
2.
ĘŇÁŇöŕ˘ŐÂąâ»ĂáˇĂÁăËé NodeMCU
ĂŃş¤čҨҡ¤ÍÁľÔÇŕµÍĂěÁҤǺ¤ŘÁĂŐŕĹÂěä´é
ÍŘ»ˇĂłě·ŐčăŞé㹡ŇĂ·´Ĺͧ
1. ŕ¤ĂŐčͧ¤ÍÁľÔÇŕµÍĂě·ŐčÁŐĂĐşş»ŻÔşŃµÔˇŇĂ
Windows
(µŃé§áµč Windows 7 ˘Öéąä»)
ľĂéÍÁµÔ´µŃé§â»ĂáˇĂÁ Arduino IDE 1.8.8 IoT 1
ŕ¤Ă×čͧ
2. NodeMCU v.3 1
şÍĂě´
3. NodeMCU Base Ver
1.0 1
şÍĂě´
4. şÍĂě´ĂŐŕĹÂ쪹Դ 4 Şčͧ 1
şÍĂě´
5. ĘŇÂ USB 1
ŕĘéą
6. ĘҵčÍǧ¨Ă (ĘҨŃÁľě
ŕÁŐÂ-ŕÁŐÂ) 6
ŕĘéą
ÇÔ¸ŐˇŇĂ·´Ĺͧ
µÍą·Őč
1 ˇŇĂŕ˘ŐÂąâ»ĂáˇĂÁŕľ×čÍáĘ´§ĽĹĽčŇąľÍĂěµÍąŘˇĂÁ
1.
ŕ˘ŐÂąâ¤é´â»ĂáˇĂÁáĘ´§˘éͤÇŇÁĽčŇąľÍĂěµÍąŘˇĂÁ´Ń§áĘ´§´éŇąĹčҧąŐé
¨ŇˇąŃ鹨֧ÍŃ»âËŴŧĘŮčşÍĂě´ NodeMCU â´ÂŕÁ×čÍĂŃąâ¤é´â»ĂáˇĂÁąŐé NodeMCU
¨ĐĘ觤čŇ·Őč¤ÓąÇłä´é ä»áĘ´§ĽĹÂѧľÍĂěµÍąŘˇĂÁ˘Í§¤ÍÁľÔÇŕµÍĂě·Řˇ ć 2
ÇԹҷŐ
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 |
// Basic Serial Communication with NodeMCU ESP8266 // Temperature Conversion float Celsius = 23.32; float Fahrenheit = 0; void setup() { Serial.begin(9600); } void loop() {
Serial.print("Temperature");
Serial.print("\t"); Serial.print(Celsius); Serial.print(" C -> \t"); Serial.print((9/5)*Celsius+32); Serial.println("
F"); delay(2000); } |
2.
ŕ»Ô´ Serial Monitor (ăąŕÁąŮ Tools) ŕľ×čÍĘѧࡵĽĹĹŃľ¸ě·Őčä´é
3.
ËҡĹͧ¤ÓąÇł¤čŇÍŘłËŔŮÁÔ·ŐčáĘ´§´éÇÂĘÁˇŇĂăąşĂĂ·Ń´·Őč 16 ´éÇÂŕ¤Ă×čͧ¤Ô´ŕŢ ¨ĐľşÇčŇ
¤čŇ·Őčä´éäÁčµĂ§ˇŃş¤čŇ·ŐčáĘ´§´éǤÍÁľÔÇŕµÍĂě ąŃ蹤×Í
ˇŇäӹdz´éÇÂâ»ĂáˇĂÁÁŐ˘éÍĽÔ´ľĹŇ´ËĂ×ͺѤ (bug) ÍÂŮč
˘ÍăËéáˇéä˘â´ÂˇŇĂŕ»ĹŐčÂąŞąÔ´µŃÇŕŢ·ŐčăŞé¤ÓąÇłŕ»çąŕŢ·ČąÔÂÁâ´ÂˇŇĂŕľÔčÁ¨Ř´·ČąÔÂÁáĹĐČŮąÂěŧăąâ¤é´·Őč¤ÓąÇł
¤×Í áˇéä˘â¤é´şĂĂ·Ń´·Őč 16 ŕ»çą
|
16 |
Serial.print((9.0/5.0)*Celsius+32); |
¨ŇˇąŃ鹨֧ÍŃ»âËĹ´ăËÁčáĹéÇĘѧࡵĽĹĹŃľ¸ě·Őčä´é
µÍą·Őč
2 ˇŇĂŕ˘ŐÂąâ»ĂáˇĂÁŕľ×čͤǺ¤ŘÁĂŐŕĹÂěĽčŇąľÍĂěµÍąŘˇĂÁ
㹡ŇĂ·´ĹͧµÍąąŐé ŕ»çąˇŇĂăŞé¤ŐÂěşÍĂ촤Ǻ¤ŘÁˇŇ÷ӧҹ˘Í§ĂŐŕĹÂěĽčŇąˇŇĂĘ觢éÍÁŮĹĽčŇąľÍĂěµÍąŘˇĂÁ
â´ÂˇŇáÓËą´ăË顴»ŘčÁşą¤ŐÂěşÍĂě´ ŕľ×čÍăËéĂŐŕĹÂěŕ»Ô´ËĂ×ͻԴǧ¨Ă
1.
µčÍǧ¨Ă´Ń§ĂŮ»·Őč 5.9
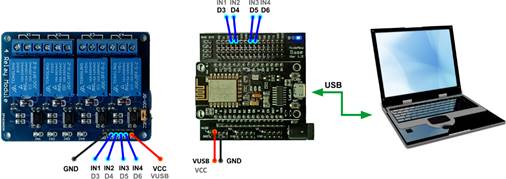
ĂŮ»·Őč
5.9
ǧ¨Ă¤Çş¤ŘÁˇŇ÷ӧҹÍŘ»ˇĂłěäżżéŇĽčŇąˇŇĂĘ×čÍĘŇĂẺ͹ءĂÁ
2.
ŕ˘ŐÂąâ¤é´â»ĂáˇĂÁ¤Çş¤ŘÁˇŇ÷ӧҹ˘Í§ĂŐŕĹÂě·Ńé§ 4 µŃÇ
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 |
// Control Relays via Serial with
NodeMCU ESP8266 #define ON LOW #define OFF HIGH char buff; int Relay1 = D3; int Relay2 = D4; int Relay3 = D5; int Relay4 = D6; void setup() { Serial.begin(9600); pinMode(Relay1, OUTPUT); pinMode(Relay2, OUTPUT); pinMode(Relay3, OUTPUT); pinMode(Relay4, OUTPUT); } void loop() { buff = Serial.read(); if(buff == '1') {
digitalWrite(Relay1, ON); } if(buff == '5') {
digitalWrite(Relay1, OFF); } if(buff == '2') {
digitalWrite(Relay2, ON); } if(buff == '6') {
digitalWrite(Relay2, OFF); } if(buff == '3') {
digitalWrite(Relay3, ON); } if(buff == '7') {
digitalWrite(Relay3, OFF); } if(buff == '4') {
digitalWrite(Relay4, ON); } if(buff == '8') {
digitalWrite(Relay4, OFF); } } |
3.
·´ĘÍşˇŇäǺ¤ŘÁ â´ÂˇŇĂ»éÍą˘éÍÁŮŨҡ¤ŐÂěşÍĂě´ŕ˘éҷҧľÍĂěµÍąŘˇĂÁ
áşş˝ÖˇËŃ´·éŇ¡ŇĂ·´Ĺͧ
¨§ŕ˘ŐÂąâ»ĂáˇĂÁŕľÔčÁŕµÔÁ¨Ňˇâ»ĂáˇĂÁ㹡ŇĂ·´ĹͧµÍą·Őč
2 â´ÂˇÓËą´ŕ§×čÍąä˘ÇčŇ ËҡŕĂҡ´»ŘčÁ ‘0’
şą¤ŐÂěşÍĂě´áĹéÇĂŐŕĹÂě·ŘˇµŃǨРOFF áĹĐËҡŕĂҡ´»ŘčÁ ‘9’
áĹéÇĂŐŕĹÂě·ŘˇµŃǨРON