��äǺ���������������
��ѡ��÷ӧҹ�ͧ������������
������������
(Servo
Motor) ���
������俿�ҡ���ʵç����ѡ�١������㹡�äǺ���������͵��˹��ԧ��鹷���դ��������´�٧
��������������л�Сͺ���������� �ش����� ��к��촤Ǻ���
����������������ǡѹ ��Ш��Ѻ�ѭ�ҳ�Ǻ��� (signal, S) ��§
1 ��� �����§ VCC ��С��Ǵ� GND
�ա���ҧ�� 1 ��� ����� 3 ���
�·�����������ö�Ǻ��������������������ع㹷�ȵ��������ԡ� (��ع���) ����
�ǹ������ԡ� (��ع����) �� �������㹡����ع����� 0 ͧ�� �֧ 180 ͧ��
��蹤�� �����Ǩ���ع����§ 180 ͧ�����ͤ����ͺ��ҹ�� ���յ��˹觡�觡�ҧ������
90 ͧ�� �ѭ�ҳ S �����Ǻ��������쪹Դ�������ѭ�ҳ����ա���ʹ��ŵ�������ҧ�����
(Pulse Width Modulation, PWM) ������дѺ�ç�ѹẺ
TTL �дѺ�ç�ѹ VCC ����������������������㹪�ǧ����ҳ
4 �֧ 6 ��ŵ� �ٻ��� 8.1(�) �ʴ��Ҿ���¢ͧ�����������좹Ҵ��硷�������
�ٻ��� 8.1(�) �ʴ��ѡɳ����㹢ͧ��������������
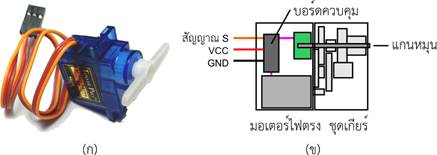
�ٻ���
8.1
�ѡɳз��������ç���ҧ���㹢ͧ������������
��÷ӧҹ�ͧ������������
����ͨ����ѭ�ҳ�����������ѧ���������������ǹǧ�äǺ������㹨зӡ����ҹ��л����żŤ�Ҥ������ҧ�ͧ�ѭ�ҳ�������������������Ť���繵��˹�ͧ�ҷ���ͧ������������
��ع���������ѧ���˹觹�� �����觤����价ӡ�äǺ������������
��ع��ѧ���˹觷���ͧ��� ����ૹ����͡���˹��繵�ǻ���Ѻ�����������ع
� �
�����ǧ�äǺ������º��º�Ѻ����Թ�ص���ͤǺ����������˹觷���ͧ������ҧ�١��ͧ�����
�ѭ�ҳ���������Ѻ�Ǻ���������������
��äǺ�������������������¡�����ҧ�ѭ�ҳ���������Ѻǧ�äǺ�������������������ѧ��ٻ���
8.2 �������������ҧ�����Һ���� 20 ������Թҷ� (ms) ���ǻ�Ѻ�������ҧ�ͧ����������ҡѺ
1.5 ms ������������Ǩ���������˹觡�觡�ҧ (90
ͧ��) �ѧ�ٻ��� 8.2(�) �����ع㹪�ǧ��� 0-90 ͧ�� ����������ҧ㹪�ǧ����ҳ
0.5-1.5 ms ���������ع仵��˹觢����� (���������ԡ�,
0 �֧ 90 ͧ��) �ѧ�ٻ��� 8.2(�)
��ж���觾������ҧ����ҳ 1.5-2.5 ms ��ع�ͧ���������ع仴�ҹ�������
(�ǹ������ԡ�, 90 �֧ 180 ͧ��)
�ѧ�ٻ��� 8.2(�)
��û��ѭ�ҳ��������դ������ҧ����� ~0.5 ms 仨��֧ 1.5 ms �������������������ع�ǹ������ԡ�
��觶�Ҥ�Ҥ������ҧ�������觵�ҧ�ҡ��� 1.5 ms �ҡ������������������������ع仡���ҡ�����ҹ��
��û��ѭ�ҳ��������դҺ���Ҫ�ǧ�ǡ�ҡ���� 1.5 ms �֧����ҳ 2.5 ms �з������������������ع�ǹ������ԡ�
�¶�Ҥ�Ҥ������ҧ����������ҧ�ҡ 1.5 ms �ҡ������������������������ع仡���ҡ�����ҹ��
����Ѻ��äǺ������������ͺ㹡����ع����������������ҡ�����ö�����¡�˹���Ҵ�ͧ������������˹�ǧ���һ�Сͺ
�¡�÷��ͧ㹵�ش���� (���� 3) ���ʴ������繶֧�Ըա�÷ҧ�����㹡�û�Ѻ�������Ǣͧ�����������������ع���ŧ
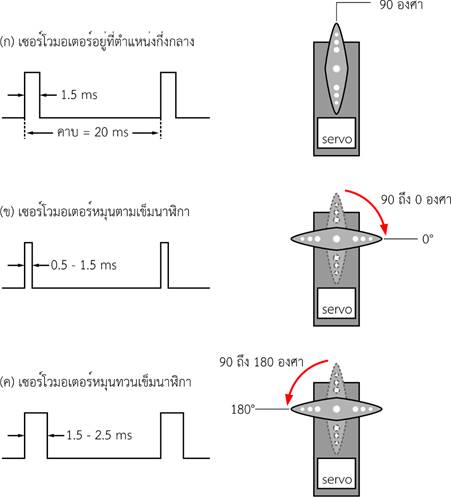
�ٻ���
8.2
�ѡɳо����ͧ�ѭ�ҳ�����Ǻ�����з�ȷҧ�����ع�ͧ������������
�¾�������ʴ��ФǺ����������������������㹵��˹觷�� ��� (�) 90 ͧ�� (�)
90-0 ͧ�� ��� (�) 90 � 180 ͧ��
�ź����
Servo.h
�ѧ��ѹ��ź����
Servo.h
�繿ѧ��ѹ����Ҿ�����Ѻ Arduino IDE ���տѧ��ѹ�������Ǣ�ͧ�Ѻ��äǺ���������������
���
�ѧ��ѹ attach() ��Ϳѧ��ѹ�����㹡�á�˹����ѭ�ҳ����������������鹵�͡Ѻ�������ä��������������˹��������ҧ�ͧ�������
0 ͧ����� 180 ͧ�� ������¡�����������
servo.attach(pin) ���� servo.attach(pin,
min, max)
��
servo
����ѵ�ط����ҡ�˹���鹡� ��о���������ͧ����觹�� ���� pin
��� ���ѭ�ҳ�ͧ�������ä�������������������͡Ѻ������������
min ��� �������ҧ�ͧ������� 0
ͧ�Ңͧ�������������Ƿ���� �¡�˹��˹��������Թҷ� (µs) �»��������ҡ����ա�õ�駤�� ������С�˹��������� 544, max ��� �������ҧ�ͧ������� 180 ͧ�Ңͧ Servo ��Ƿ�����˹��������Թҷ�
�»��������ҡ����ա�õ�駤��������С�˹��������� 2400
�ѧ��ѹ write()
��Ϳѧ��ѹ�����Ǻ������˹觷���ͧ��������������������ع��ѧͧ�ҷ���˹�
����ö��˹��繤��ͧ������� ��� 0-180 ͧ��
��������������쪹Դ����� Full Rotation ����� write
���繡�á�˹���������㹡����ع�¤����ҡѺ 90 ��ͤ���������������ش��ع �����ҡѺ 0
��͡����ع���¤��������٧�ش㹷�ȷҧ˹�� ��Ф����ҡѺ 180 ��͡����ع���¤��������٧�ش㹷�ȷҧ�ç�ѹ���� ������¡�����������
servo.write(angle)
����������
angle
����������ͧ��������������������ع�
�ѧ��ѹ writeMicroseconds() ��Ϳѧ��ѹ�����Ǻ������˹觷�������������ع��ѧ���˹�ͧ�ҷ���˹��¡�˹��繤�Ҥ������ҧ�ͧ������˹���
µs
��觻������� ���������������仨���������ҧ�ͧ����������� 1000-2000
µs ������������仢�ҧ������
������ҧ������ͺҧ��������������ǧ�������ҧ�ͧ������������������������
�Ҩ�����ǧ 700-2300 ᷹������ö��ѧ��ѹ writeMicroseconds
������͡�˹��������ҧ��������ͧ �����ѧ���� writeMicroseconds
����ö��˹����������� ��ҵ�ͧ���ѧ㹡����ҹ
�ҡ��觧ҹ���������������Ẻ 0 - 180 ͧ��
��ع��Թ�ش����ش����Թ��駽�� 0 ���� 180 ͧ��
�з�����Դ���§��ҧ�ѧ�ҡ�����ع仵����������������СԹ������٧��鹴�����������ǡѹ���
����Ҩ�������������������� ������¡�����������
servo.writeMicroseconds(µs)
����������
µs
��ͤ�Ҥ������ҧ�ͧ��������ͧ��á�˹��˹��������Թҷ�
(�µ���èӹǹ���)
�ѧ��ѹ read() ��Ϳѧ��ѹ��ҹ���ͧ�ҷ��������仴��¿ѧ��ѹ
write()
��������Һ��ҵ��˹�ͧ���ش���·�����������仹���դ����������觤�ҷ����ҹ�͡�ҹ�鹨��դ������㹪�ǧ
0 � 180 �ѧ��ѹ������¡��������վ�����������
servo.read()
�ѧ��ѹ attached() ��Ϳѧ��ѹ������Ǩ�ͺ�������������������ҵ�ͧ�������ѧ�������Ѻ���ѭ�ҳ�ͧ�������ä���������������
������¡����������� servo.attached() �¿ѧ��ѹ�����觤��
True �͡�� �ҡ������������������������Ѻ����
�ѧ��ѹ detach() ��Ϳѧ��ѹ�ʶҹТͧ�ҷ����ҡ�˹�����繢ҤǺ�����������������¤����
attach()
����Ѻ����������ҹ���� ������¡����������� servo.detach()
��÷��ͧ�Ǻ���������������
�ѵ�ػ��ʧ��
1.
���㨡�÷ӧҹ�ͧ������������
2.
����ö��¹�����������ä��������Ǻ�����������������
�ػ�ó�����㹡�÷��ͧ
1. ����ͧ���������������к���Ժѵԡ��
Windows
(����� Windows 7 ����)
������Դ�������� Arduino IDE 1.8.8 IoT 1
����ͧ
2. NodeMCU v.3 1
����
3. NodeMCU Base
Ver 1.0 1
����
4. ������������ 1
���
5. ��ᴻ���� 9 V 1
���
6. ��� USB 1
���
7. ��µ��ǧ�� (��¨����
���-����) 3
���
�Ըա�÷��ͧ
����
1 ��äǺ�����ȷҧ�����ع�ͧ������������
1.
����������������������ҡѺ���� NodeMCU v.3 �ѧ�ٻ��� 8.3
��㹡�÷��ͧ��� ����Ҩ�е�ͧ����ᴻ���� 9 V ������������� NodeMCU Base ���ͻ�������������������
2.
��¹��������ѧ����ʴ��˹�ҶѴ�
�ҡ��鹨֧�ѻ��Ŵ�����ѧࡵ��ȷҧ�����ع�ͧ������������
3.
���ͧ����¹�������㹺�÷Ѵ��� 17 �ҡ 1000 �� 600
�����ѧࡵ����ش���·����������������ع�㹷�ȷҧ���������ԡ��ҡ����ش
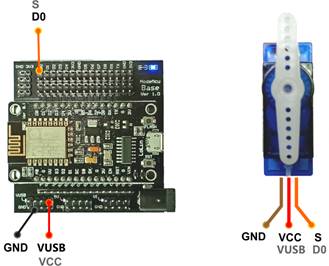
�ٻ���
8.3
��õ��ǧ��㹡�÷��ͧ�Ǻ���������������
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 |
// Control Servo Motor by NodeMCU
ESP8266 #include <Servo.h> Servo myservo; void setup() { // Servo at PIN D0 myservo.attach(D0); pinMode(D4, OUTPUT); // On Board LED } void loop() { digitalWrite(D4,LOW); // LED ON (active Low)
myservo.writeMicroseconds(1500);
// Center delay(5000);
myservo.writeMicroseconds(1000);
// Rotate CW delay(2000);
myservo.writeMicroseconds(2000); // Rotate CCW
digitalWrite(D4,HIGH); //
LED OFF (active high) delay(2000); } |
Ἱ�ѧ��÷ӧҹ�ͧ�����㹵��� 1
����ʴ��ѧ�ٻ��� 8.4
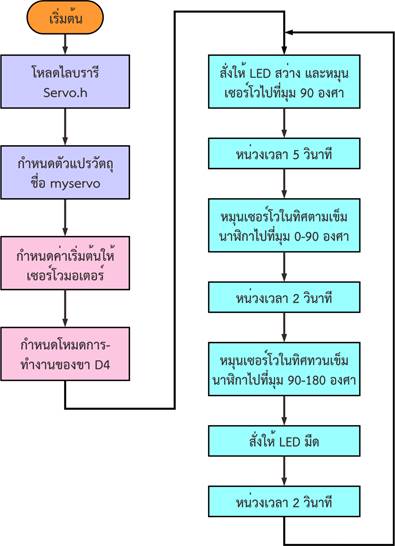
�ٻ���
8.4 Ἱ�ѧ��÷ӧҹ�ͧ���������ʴ�㹡�÷��ͧ���� 1
����
2 ��äǺ�������ͧ������������
1.
����������������������ҡѺ���� NodeMCU v.3 �ѧ�ٻ��� 8.3
2.
��¹��������ѧ����ʴ���ҧ��ҧ���
�ҡ��鹨֧�ѻ��Ŵ�����ѧࡵ���˹觢ͧ������������
3.
���ͧ����¹������㹺�÷Ѵ��� 19 �ҡ 180 �� 135
�����ѧࡵ����ش���·����������������ع�㹷�ȷҧ�ǹ������ԡ��ҡ����ش
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 |
// Control Servo Motor by NodeMCU
ESP8266 #include <Servo.h> Servo myservo; void setup() { // Servo at PIN D0 myservo.attach(D0); pinMode(D4, OUTPUT); // On Board LED } void loop() { digitalWrite(D4,LOW); // LED ON (active Low) myservo.write(90); // Center delay(5000); myservo.write(0); // Rotate CW delay(2000); myservo.write(180); // Rotate CCW
digitalWrite(D4,HIGH); //
LED OFF (active high) delay(2000); } |
����
3 ��äǺ�������������ͧ������������
1.
����������������������ҡѺ���� NodeMCU v.3 �ѧ�ٻ��� 8.3
2.
��¹��������ѧ����ʴ���ҧ��ҧ���
�ҡ��鹨֧�ѻ��Ŵ�����ѧࡵ����������ͧ������������
3.
���ͧ����¹������ҷ��˹�ǧ㹺�÷Ѵ��� 16 ��� 21 �ҡ 15 �� 50
�����ѧࡵ��������㹡����ع�ͧ��������������ع�㹷�ȷҧ�ǹ������ԡ��ҡ����ش
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 |
// Control Servo Motor by NodeMCU
ESP8266 #include <Servo.h> Servo myservo; void setup() { // Servo at PIN D0 myservo.attach(D0); } void loop() { int pos; for (pos = 0; pos <
180; pos += 1) {
myservo.write(pos);
delay(15); } for (pos = 180; pos >=
1; pos -= 1) {
myservo.write(pos);
delay(15); } } |