ˇŇäǺ¤ŘÁĘŕµç»»Ôé§ÁÍŕµÍĂě
Ęŕµç»»Ôé§ÁÍŕµÍĂě
Ęŕµç»»Ôé§ÁÍŕµÍĂě
(Stepping
Motor) ËĂ×Í Ęŕµç»ÁÍŕµÍĂě (Step Motor) ËĂ×Í
Ęŕµç»ŕ»ÍĂěÁÍŕµÍĂě (Stepper Motor)
¤×ÍÁÍŕµÍĂě俵ç»ĂĐŕŔ·ËąÖ觷ŐčˇŇĂËÁŘąáşč§Í͡ŕ»çąĘŕµç»ËĂ×͢ŃéąÂčÍÂ ć ·Őčŕ·čҡѹ
â´ÂŕĂŇĘŇÁŇö¤Çş¤ŘÁăËéÁÍŕµÍĂěąŐéËÁŘąä´éµŇÁ¨ÓąÇąĘŕµç»·ŐčµéͧˇŇĂáĹĐÂѧĘŇÁŇö·ÓăËéÁÍŕµÍĂ줧µÓá˹觹ŃéąäÇé´éÇ¡ŇèčŇ¡ĂĐáĘäżżéŇ
㹡ŇäǺ¤ŘÁµÓá˹觢ͧÁÍŕµÍĂě»ĂĐŕŔ·ąŐé ÁŐ˘éÍ´Ő¤×Í
ŕĂŇäÁč¨Óŕ»çąµéͧăŞéŕ«ąŕ«ÍĂěµĂǨ¨ŃşµÓáËąč§ĘÓËĂŃşˇŇĂ»éÍąˇĹŃş
áµčÁÍŕµÍĂě»ĂĐŕŔ·ąŐéÁŐ˘éÍŕĘŐÂŕÁ×čÍŕ·ŐÂşˇŃşÁÍŕµÍĂě俵ç¤×Í ÁŐáçşÔ´¤čÍą˘éҧµčÓ
áĹСԹˇĂĐáĘĘ٧áÁé㹢łĐ·ŐčÁÍŕµÍĂěäÁčËÁŘą
ĘÓËĂŃşŕ͡ĘŇĂąŐéŕĂҨСĹčŇǶ֧Ęŕµç»»Ôé§ÁÍŕµÍĂě·ŃčÇ仪ąÔ´ĘͧËĂ×ÍĘŐčŕżĘŕ·čŇąŃéą
ĘÓËĂŃşĘŕµç»»Ôé§ÁÍŕµÍĂ쪹ԴËĹŇÂŕżĘ¨ĐÁŐ˘éÍ´Ő¤×ÍÁŐĂĐ´ŃşˇŇĂĘŃčąµčÓ
»ĂĐĘÔ·¸ÔŔŇľ´ŐˇÇčŇ áµčăŞé§Ňąä´éÂҡáĹĐÁŐĂҤŇᾧ
ËĹѡˇŇ÷ӧҹ˘Í§Ęŕµç»»Ôé§ÁÍŕµÍĂě¤×Í
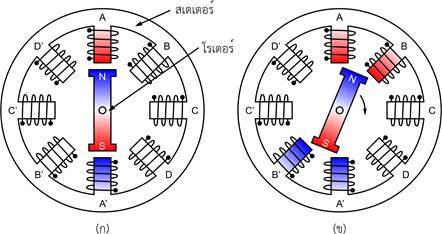
ŕĂҨШčŇÂäżăËéáˇč˘´ĹÇ´·ŐčµÔ´µŃé§ÍÂŮčşąĘŕµŕµÍĂě (stator)
ŕľ×čÍăËéĘč§ĘąŇÁáÁčŕËĹçˇÍ͡ÁŇ áĹĐĘčÇą·Őčŕ»çąµŃÇËÁŘąËĂ×ÍâĂŕµÍĂě (rotor) ¨ĐÁŐ᡹ŕ»çąáÁčŕËĹ硶ŇÇĂ ˇŇèčŇ¡ĂĐáĘŕ˘éŇä»·Ő袴ĹÇ´·ÓăËéŕˇÔ´áç´Ö§´Ů´¨ŇˇĘąŇÁáÁčŕËĹçˇ
·ÓăËéâĂŕµÍĂěËÁŘą â´ÂŕÁ×čÍŕĂŇ·ÓˇŇèčŇ¡ĂĐáĘăËéˇŃş˘´ĹÇ´áµčĹТ´ÍÂčҧµčÍŕą×čͧ¨Đ·ÓăËéÁÍŕµÍĂěËÁŘąÍÂčҧµčÍŕą×čͧ
áĹĐËҡŕĂҵéͧˇŇĂăËéÁÍŕµÍĂěËÁع仵ŇÁ¨ÓąÇąĘŕµç»·ŐčˇÓËą´ˇçĘŇÁŇö·Óä´éâ´ÂˇŇèčŇÂľŃĹĘěˇĂĐáĘĽčŇą˘´ĹÇ´µŇÁ¨ÓąÇąĘŕµç»·ŐčµéͧˇŇĂ
ĂŮ»·Őč 1 (ˇ) áĘ´§ˇŇ÷ӧҹ˘Í§Ęŕµç»»Ôé§ÁÍŕµÍĂě â´ÂŕÁ×čͨčŇÂäżăËéáˇč˘´ĹÇ´ŞŘ´ A-A’ ˇç¨Đ·ÓăËé᡹ËÁŘą¶ŮˇĹçͤÍÂŮč·ŐčµÓá˹觹Ńéą
äÁčŕ¤Ĺ×čÍą·Őčä»äËąáÁéÁŐáçˇĂзӨҡŔŇ¹͡ ăąĂŮ»·Őč 1 (˘) ¤×ÍŕÁ×čÍÁŐˇŇĂ»éÍąˇĂĐáĘä»Âѧ˘´ĹÇ´ŞŘ´
B-B’ ´éÇ¡ç¨Đ·ÓăËé᡹ËÁŘąËÁع仵ŇÁ·Ôȷҧ˘Í§ĘąŇÁáÁčŕËĹ硷ŐčŕËąŐčÂÇąÓ
â´ÂˇŇĂËÁŘąăą·ÔȵŇÁŕ˘çÁąŇĚԡҨĐŕˇÔ´˘ÖéąŕÁ×čÍÁŐˇŇĂ»éÍąˇĂĐáĘăËéŕˇÔ´ĘąŇÁáÁčŕËĹçˇËÁعǹµŇÁĹÓ´Ńş
A-B-C-D áĹĐËҡµéͧˇŇĂăËéËÁŘąăą·ÔČ·Çąŕ˘çÁąŇĚÔˇŇ
ˇçĘŇÁŇö·Óä´éŕŞčąˇŃą â´ÂˇŇáĹŃşĹÓ´ŃşˇŇĂ»éÍąˇĂĐáĘăËéáˇč˘´ĹÇ´şąÁÍŕµÍĂě
ĂŮ»·Őč
1
ˇŇ÷ӧҹ˘Í§Ęŕµç»»Ôé§ÁÍŕµÍĂě (ˇ) ˘łĐĹçͤăËéËÂŘ´ąÔč§
áĹĐ (˘) ˘łĐˇÓĹѧËÁع令ĂÖč§Ęŕµç»
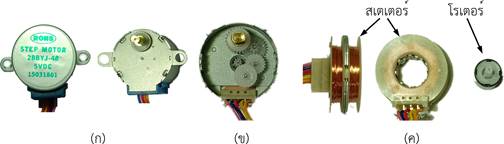
ĂŮ»·Őč 2 áĘ´§µŃÇÍÂčҧŔŇľ¶čŇÂĹѡɳĐŔŇ¹͡áĹĐŔŇÂ㹢ͧĘŕµç»»Ôé§ÁÍŕµÍĂěŕşÍĂě
28BYJ-48 «Öč§ŕ»çąĘŕµç»»Ôé§ÁÍŕµÍĂě俵碹ҴŕĹçˇ (5 V) ·ŐčÁŐăŞéˇŃąÍÂčҧáľĂčËĹŇÂ
â´ÂŔŇÂăąµŃÇÁÍŕµÍĂě¨ĐÁŐŕż×ͧ·´ÍÂŮč´éÇ (ĂŮ»·Őč 2 (˘)) ·ÓăËéĘŇÁŇöĘč§áçşÔ´ä´éÁҡ˘Öéą â´ÂÁÍŕµÍĂ쪹ԴąŐéŕ»çąáşşĘŐčŕżĘáşş˘ŃéÇŕ´ŐÂÇ
(unipolar) ·ŐčÁŐˇŇĂŕŞ×čÍÁµčÍËĂ×Íá·ç» (tap) µĂ§ˇĹҧ˘Í§˘´ĹÇ´áµčĹĐŞŘ´ ·ÓăËéÁÍŕµÍĂěąŐéÁŐĘŐčŕżĘ áĹĐ·ÓăËéŕĂŇĘŇÁŇö¤Çş¤ŘÁÁÍŕµÍĂěä´éÍÂčҧ§čŇ´ŇÂÂÔ觢ÖéąáĹĐÁŐâ͡ŇĘ·Őč¨ĐµčÍĘŇÂ俼ԴľĹŇ´ä´éąéÍÂŧ
ĂŮ»·Őč
2
ŔŇľ¶čŇ (ˇ) ĹѡɳĐŔŇ¹͡ (˘) ŔŇÂăąĘčÇą˘Í§ŕż×ͧ·´ áĹĐ (¤) ŔŇÂăąĘčÇą˘Í§ĘŕµŕµÍĂěáĹĐâĂŕµÍĂě˘Í§Ęŕµç»»Ôé§ÁÍŕµÍĂě 28BYJ-48
ˇŇäǺ¤ŘÁĘŕµç»»Ôé§ÁÍŕµÍĂě
㹡ŇĂăŞé§ŇąĘŕµç»»Ôé§ÁÍŕµÍĂě
ŕş×éͧµéąŕĂҨеéͧ·ĂŇşĹѡɳСŇþѹ˘´ĹÇ´˘Í§ÁÍŕµÍĂě·ŐčŕĹ×͡ăŞé «Öč§ŕĂŇĘŇÁŇö·ĂŇşä´é¨ŇˇáĽčą˘éÍÁŮŢͧÁÍŕµÍĂěąŃéą
ć â´ÂĘčÇąÁҡĘբͧĘŇÂ俢ͧĘŕµç»»Ôé§ÁÍŕµÍĂě¨ĐĘŃÁľŃą¸ěˇŃşˇŇþѹ˘´ĹÇ´µŇÁ·ŐčĽŮéĽĹÔµˇÓËą´
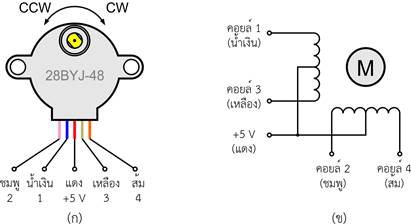
ĂŮ»·Őč 3
áĘ´§µŃÇÍÂčҧ áĘ´§ĹѡɳСŇĂÇҧĘŇÂáĹĐĘբͧ˘´ĹÇ´ŔŇÂăąĘŕµç»»Ôé§ÁÍŕµÍĂě
28BYJ-48 áĹĐĘÓËĂŃşˇŇĂËÁŘą˘Í§ÁÍŕµÍĂěąŐé ŕĂҨСÓËą´ăËéËÁŘąä´é·Ńé§ăą·ÔȵŇÁŕ˘çÁąŇĚÔˇŇ
(clockwise, CW) áĹĐ·Çąŕ˘çÁąŇĚÔˇŇ (counter
clockwise, CCW) ˘Ö鹡ѺĹÓ´ŃşˇŇĂĘ觡ĂĐáĘŕ˘éŇĘŮ袴ĹÇ´
ĘÓËĂŃşˇŇäǺ¤ŘÁĘŕµç»»Ôé§ÁÍŕµÍĂěąŃéą
ŕĂҨзÓä´éĽčŇąˇŇĂĘŃ觡ŇĂ´éÇÂäÁâ¤Ă¤Íąâ·ĂĹŕĹÍĂě
â´Âŕą×čͧ¨ŇˇäÁâ¤Ă¤Íąâ·ĂĹŕĹÍĂěäÁčĘŇÁŇöăËé˘ŃşˇĂĐáʢ´ĹÇ´ŔŇÂăąÁÍŕµÍĂěä´éâ´ÂµĂ§
ŕĂҨ֧¨Óŕ»çąµéͧÁŐşÍĂ촢Ѻ (driver) ·Őč·ÓËąéŇ·Őč¨čŇ¡ĂĐáĘ â´Â
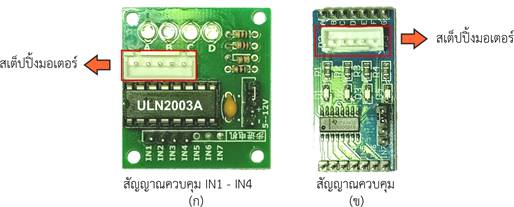
äÍ«ŐŕşÍĂě·ŐčąÔÂÁąÓÁŇăŞé¤Çş¤ŘÁĘŕµç»»Ôé§ÁÍŕµÍĂ좹ҴŕĹçˇ ¤×Í äÍ«ŐŕşÍĂě ULN2003A
ĂŮ»·Őč 4 áĘ´§µŃÇÍÂčҧŔŇľ¶čŇÂşÍĂ촢Ѻ·ŐčăŞéäÍ«ŐŕşÍĂěąŐéâ´ÂÁŐµŃǶѧẺ
DIP (dual inline package) (ĂŮ»·Őč 4(ˇ))
áĹĐáşş SMD (surface mount device) (ĂŮ»·Őč 4(˘)) â´ÂşÍĂ촢ѺąŐé ¨čŇ¡ĂĐáĘĘ٧ĘŘ´ä´é 0.5 A
áĹĐĘŇÁŇöĂͧĂŃşáç´Ńąä´é㹪čǧ 5 - 12 V
áĹĐǧ¨ĂşÍĂ촢Ѻ·ŐčáĘ´§ąŐé Í͡ẺĘÓËĂŃşĘŕµç»»Ôé§ÁÍŕµÍĂě 4 ŕżĘ
5 ĘŇÂ
ĂŮ»·Őč
3 (ˇ) ŔŇľĹѡɳСŇĂÇҧĘŇÂ
ĘŐ áĹĐ (˘) ŔŇľĹѡɳСŇþѹ˘´ĹÇ´˘Í§Ęŕµç»»Ôé§ÁÍŕµÍĂě 28BYJ-48 ŞąÔ´ĘŐčŕżĘáşş˘ŃéÇŕ´ŐÂÇ·ŐčÁŐá·ç»µĂ§ˇĹҧ˘Í§˘´ĹÇ´áĹĐŕŞ×čÍÁµč͡ѹ
ĂŮ»·Őč
4 şÍĂ촢ѺĘŕµç»»Ôé§ÁÍŕµÍĂě·ŐčăŞéäÍ«ŐŕşÍĂě
ULN2003A áşş (ˇ) DIP áĹĐ (˘)
SMD
ˇŇĂŕŞ×čÍÁµčͧ͢Ęŕµç»»Ôé§ÁÍŕµÍĂě·ŐčăŞéäÍ«ŐŕşÍĂě ULN2003A áĹĐĘŕµç»»Ôé§ÁÍŕµÍĂěŕşÍĂě 28BYJ-48
·Óä´éâ´Â§čŇÂáĹĐÁŐĹѡɳĐǧ¨Ă´Ń§ĂŮ»·Őč 5 â´Âŕą×čͧ¨ŇˇĹѡɳТͧĘŃŇł˘ŇÍ͡¨ŇˇäÍ«Őŕ»çąáşşˇĹŃş˘ŃéÇ
´Ń§ąŃ鹨֧ÁŐˇŇèčŇÂäż VCC ăËéáˇč˘´ĹÇ´˘Í§ÁÍŕµÍĂěąŐéŕľ×čÍ·Őč¨Đ·ÓăËé
ŕÁ×čÍǧ¨Ăä´éĂŃşĘŃŇł˘Ňŕ˘éŇ·Őčŕ»çąĹͨԡ HIGH áĹéÇ
¨ĐŕˇÔ´ˇĂĐáĘäËĹĽčŇą˘´ĹÇ´ŔŇÂăąÁÍŕµÍĂě (¨Ňˇ VCC ä»ÂѧˇĂŇÇ´ě
ĽčŇąäÍ«Ő) áĹĐÁÍŕµÍĂě¨Đ·Ó§Ňą
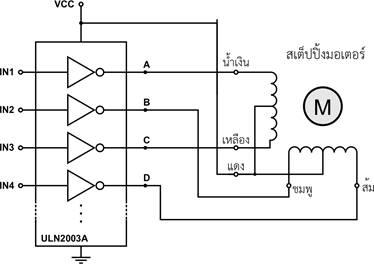
ĂŮ»·Őč
5 ŔŇľĹѡɳĐǧ¨Ă˘ŃşĘŕµç»»Ôé§ÁÍŕµÍĂěâ´ÂäÍ«ŐŕşÍĂě ULN2003A áĹĐĘŕµç»»Ôé§ÁÍŕµÍĂěŕşÍĂě 28BYJ-48
ĘÓËĂŃşĘŃŇł·ŐčăŞé㹡ŇäǺ¤ŘÁˇŇĂËÁŘą˘Í§ÁÍŕµÍĂě 4 ŕżĘ (ăËéŞ×čÍŕ»çą A,
B, C, áĹĐ D) ąŃéą ¨ĐÁŐĹѡɳдѧĂŮ»·Őč 6
ąŃ蹤×Í ŕĂҨĐĘŃ觡ŇĂăËé¨čŇ¡ĂĐáĘä»Âѧ˘´ĹÇ´·ŐĹТ´µŇÁĹÓ´Ńş
ŕľ×čÍăËéÁÍŕµÍĂěËÁŘąµŇÁ·ŐčµéͧˇŇĂ â´ÂĘÓËĂŃşĂŮ»·Őč 6(ˇ)
¤×͡ŇĂĘŃ觡ŇĂăËéÁÍŕµÍĂěËÁŘąµŇÁŕ˘çÁąŇĚÔˇŇ â´Â¨ĐÁŐˇŇáĹŃşâŨԡ¨Ňˇ
HIGH ŕ»çą LOW ·ŐčäÍ«Ő ULN2003A
ŕľ×čÍăËéˇĂĐáĘäËĹ㹢´ĹÇ´·ŐčµčÍÍÂŮč áĹĐĂŮ»·Őč 6(˘) ¤×͡ŇĂĘŃ觡ŇĂăËéÁÍŕµÍĂěËÁŘą·Çąŕ˘çÁąŇĚÔˇŇ
«Öč§ŕ»çąŕľŐ§ˇŇáĹŃşĹÓ´ŃşˇŇĂĘŃ觡ŇĂ ĘÓËĂŃşˇŇĂĘŃ觡ŇĂăËéÁÍŕµÍĂěËÁŘąŕĂçÇËĂ×ÍŞéŇąŃéą
ŕĂŇĘŇÁŇö·Óä´éâ´ÂˇŇäǺ¤ŘÁ¤ÇŇÁˇÇéҧ˘Í§ľŃĹĘěĘŃŇł·Őč»éÍąăËéáˇčşÍĂ촢Ѻ (¤čŇ T
ăąĂŮ»·Őč 6(ˇ)) â´Â¤čŇąŐé¨ĐµéͧÁŐ¤čŇäÁčąéÍÂŕˇÔąä»
ŕľĂŇĐÁÍŕµÍĂě«Öč§ŕ»çąÍŘ»ˇĂłě·Ň§ˇĹÍҨµÍşĘąÍ§äÁč·ŃąˇŃşĘŃŇłäżżéŇ·Őč»éÍąăËéáˇč˘´ĹÇ´
ĘÓËĂŃş¤ÇŇÁŕĂçÇ㹡ŇõͺʹͧĘ٧ĘŘ´˘Í§Ęŕµç»»Ôé§ÁÍŕµÍĂě·ŃčÇ仹Ń鹨ĐÍÂŮčăąĂĐ´Ńş
1-10 ÁÔĹĹÔÇÔąŇ·Ő µč͡ŇĂ»éÍąˇĂĐáĘáµčĹĐŕżĘ
«Ö觷ÓăËéŕĂҨеéͧăŞé¤ÓĘŃč§ËąčǧŕÇĹŇăąâ»ĂáˇĂÁŕľ×čÍăËéĘŇÁŇö¤Çş¤ŘÁÁÍŕµÍĂěä´éµŇÁ·ŐčµéͧˇŇĂ
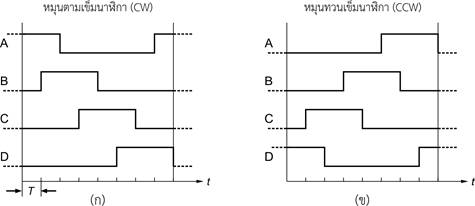
ĂŮ»·Őč
6
ĹѡɳĐĘŃŇł·Őčµéͧ»éÍąăËéáˇčĘŕµç»»Ôé§ÁÍŕµÍĂěŕľ×čÍăËéÁÍŕµÍĂěËÁŘą (ˇ)
µŇÁŕ˘çÁąŇĚÔˇŇ áĹĐ (˘) ·Çąŕ˘çÁąŇĚÔˇŇ
ˇŇĂ·´Ĺͧ¤Çş¤ŘÁĘŕµç»»Ôé§ÁÍŕµÍĂě
Çѵ¶Ř»ĂĐʧ¤ě
1.
ĘŇÁŇöµčÍşÍĂě´ Node
MCU v.3 ˇŃşşÍĂ촢ѺĘŕµç»»Ôé§ÁÍŕµÍĂěáĹĐĘŕµç»»Ôé§ÁÍŕµÍĂěä´é
2.
ĘŇÁŇöŕ˘ŐÂąâ»ĂáˇĂÁăËé
NodeMCU
¤Çş¤ŘÁ·ÔȷҧˇŇĂËÁŘą˘Í§Ęŕµç»»Ôé§ÁÍŕµÍĂěä´é
3.
ĘŇÁŇöŕ˘ŐÂąâ»ĂáˇĂÁăËé
NodeMCU
¤Çş¤ŘÁˇŇĂËÁŘą˘Í§Ęŕµç»»Ôé§ÁÍŕµÍĂěĽčŇąľÍĂěµÍąŘˇĂÁä´é
ÍŘ»ˇĂłě·ŐčăŞé㹡ŇĂ·´Ĺͧ
1. ŕ¤ĂŐčͧ¤ÍÁľÔÇŕµÍĂě·ŐčÁŐĂĐşş»ŻÔşŃµÔˇŇĂ
Windows
(µŃé§áµč Windows 7 ˘Öéąä»)
ľĂéÍÁµÔ´µŃé§â»ĂáˇĂÁ Arduino IDE 1.8.8 IoT 1
ŕ¤Ă×čͧ
2. NodeMCU v.3 1
şÍĂě´
3. NodeMCU Base
Ver 1.0 1
şÍĂě´
4. şÍĂ촢ѺÁÍŕµÍĂě·ŐčăŞéäÍ«ŐŕşÍĂě
ULN2003A 1 şÍĂě´
5. Ęŕµç»»Ôé§ÁÍŕµÍĂě 28BYJ-48 ľĂéÍÁĘŇ 1
µŃÇ
6. ÍĐá´ç»ŕµÍĂě 9 V 1
µŃÇ
7. ĘŇÂ USB 1
ŕĘéą
8. ĘҵčÍǧ¨Ă (ĘҨŃÁľě
ŕÁŐÂ-ŕÁŐÂ) 6
ŕĘéą
ÇÔ¸ŐˇŇĂ·´Ĺͧ
µÍą·Őč
1 ˇŇäǺ¤ŘÁ·ÔȷҧˇŇĂËÁŘą˘Í§ÁÍŕµÍĂě
1.
µčÍǧ¨Ă´Ń§ĂŮ»·Őč 7
2.
ŕ˘ŐÂąâ»ĂáˇĂÁ´Ń§·ŐčáĘ´§ăąâ¤é´ËąéŇ¶Ń´ä» ¨ŇˇąŃ鹨֧ÍŃ»âËŴŧ NodeMCU v.3 áĹéÇĘѧࡵ·ÔȷҧˇŇĂËÁŘą˘Í§Ęŕµç»»Ôé§ÁÍŕµÍĂě â´ÂËҡÁÍŕµÍĂěäÁčËÁŘą
ŕą×čͧ¨ŇˇäżŕĹŐ駨ҡ USB äÁčŕľŐ§ľÍ ˇç˘ÍăËéăŞéÍĐá´ç»ŕµÍĂěĂčÇÁ㹡ŇèčŇÂäżä»ÂѧşÍĂ촢ѺÁÍŕµÍĂě
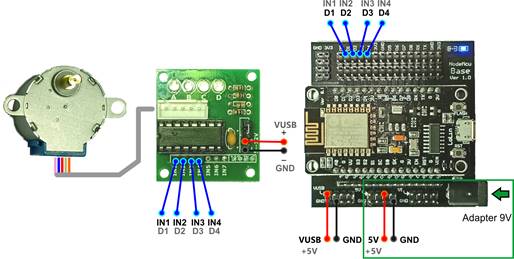
ĂŮ»·Őč
7 ˇŇĂŕŞ×čÍÁµčÍ
NodeMCU
v.3 ˇŃşşÍĂ촢ѺĘŕµç»»Ôé§ÁÍŕµÍĂěáĹĐĘŕµç»»Ôé§ÁÍŕµÍĂě â´Â㹡ĂÍşĘŐčŕËĹŐčÂÁĘŐŕ˘ŐÂǤ×͡ŇõčÍĘŇÂ㹡óշŐčäżŕĹŐ駨ҡľÍĂěµ
USB ąŃéąäÁčŕľŐ§ľÍ
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 |
// Control 4-Phase Step Motor with
ULN2003A // // 5-V Step Motor is 28BYJ48 // Pin 1-4 = (Blue, Pink, Yellow, and
Orange) // Pin 5 = VCC (Red) int motorPin1 = D1; int motorPin2 = D2; int motorPin3 = D3; int motorPin4 = D4; int motorDelay
= 5; //variable
to set motor speed //Long delay = slow speed (8*motorDelay per 1 rev) void setup() {
pinMode(motorPin1, OUTPUT);
pinMode(motorPin2, OUTPUT);
pinMode(motorPin3, OUTPUT);
pinMode(motorPin4, OUTPUT); } void loop() { // Rotate CW for(int
i=0; i < 100; i++)
{ motorCW(); // Rotate 1 rev. CW } delay(1000); // Rotate CCW for(int
i=0; i < 100; i++)
{ motorCCW(); // Rotate 1 rev. CCW } delay(1000); } void motorCW() { digitalWrite(motorPin1,
HIGH); digitalWrite(motorPin2,
LOW); digitalWrite(motorPin3,
LOW); digitalWrite(motorPin4,
LOW); delay(motorDelay); digitalWrite(motorPin1,
HIGH); digitalWrite(motorPin2,
HIGH); digitalWrite(motorPin3,
LOW); digitalWrite(motorPin4,
LOW); delay(motorDelay); digitalWrite(motorPin1,
LOW); digitalWrite(motorPin2,
HIGH); digitalWrite(motorPin3,
LOW); digitalWrite(motorPin4,
LOW); delay(motorDelay); digitalWrite(motorPin1,
LOW); digitalWrite(motorPin2,
HIGH); digitalWrite(motorPin3,
HIGH); digitalWrite(motorPin4, LOW); delay(motorDelay); digitalWrite(motorPin1,
LOW); digitalWrite(motorPin2,
LOW); digitalWrite(motorPin3,
HIGH); digitalWrite(motorPin4,
LOW); delay(motorDelay); digitalWrite(motorPin1,
LOW); digitalWrite(motorPin2,
LOW); digitalWrite(motorPin3,
HIGH); digitalWrite(motorPin4,
HIGH); delay(motorDelay); digitalWrite(motorPin1,
LOW); digitalWrite(motorPin2,
LOW); digitalWrite(motorPin3,
LOW); digitalWrite(motorPin4,
HIGH); delay(motorDelay); digitalWrite(motorPin1,
HIGH); digitalWrite(motorPin2,
LOW); digitalWrite(motorPin3,
LOW); digitalWrite(motorPin4,
HIGH); delay(motorDelay); } void motorCCW() { digitalWrite(motorPin4,
HIGH); digitalWrite(motorPin3,
LOW); digitalWrite(motorPin2,
LOW); digitalWrite(motorPin1,
LOW); delay(motorDelay); digitalWrite(motorPin4,
HIGH); digitalWrite(motorPin3,
HIGH); digitalWrite(motorPin2,
LOW); digitalWrite(motorPin1,
LOW); delay(motorDelay); digitalWrite(motorPin4,
LOW); digitalWrite(motorPin3,
HIGH); digitalWrite(motorPin2,
LOW); digitalWrite(motorPin1,
LOW); delay(motorDelay); digitalWrite(motorPin4,
LOW); digitalWrite(motorPin3,
HIGH); digitalWrite(motorPin2,
HIGH); digitalWrite(motorPin1,
LOW); delay(motorDelay); digitalWrite(motorPin4,
LOW); digitalWrite(motorPin3,
LOW); digitalWrite(motorPin2,
HIGH); digitalWrite(motorPin1,
LOW); delay(motorDelay); digitalWrite(motorPin4,
LOW); digitalWrite(motorPin3,
LOW); digitalWrite(motorPin2,
HIGH); digitalWrite(motorPin1,
HIGH); delay(motorDelay); digitalWrite(motorPin4,
LOW); digitalWrite(motorPin3,
LOW); digitalWrite(motorPin2,
LOW); digitalWrite(motorPin1,
HIGH); delay(motorDelay); digitalWrite(motorPin4,
HIGH); digitalWrite(motorPin3,
LOW); digitalWrite(motorPin2,
LOW); digitalWrite(motorPin1,
HIGH); delay(motorDelay); } |
3.
µĂǨĘÍşˇŇĂËÁŘą˘Í§ÁÍŕµÍĂě ¨ŇˇąŃéą·´Ĺͧáˇé䢤čŇ motorDelay ¨Ňˇ
5 ŕ»çą 10 ¨ŇˇąŃ鹨֧ÍŃ»âËĹ´â»ĂáˇĂÁăËÁč
áĹéÇĘѧࡵˇŇĂËÁŘą˘Í§ÁÍŕµÍĂě
µÍą·Őč
2 ˇŇäǺ¤ŘÁˇŇĂËÁŘą˘Í§ÁÍŕµÍĂěĽčŇąľÍĂěµÍąŘˇĂÁ
1.
µčÍǧ¨Ă´Ń§ĂŮ»·Őč 7
(ŕËÁ×ÍąˇŇĂ·´ĹͧµÍą·Őč 1)
2.
ŕ˘ŐÂąâ»ĂáˇĂÁâ´ÂÁŐâ¤é´´Ń§·ŐčáĘ´§ăąˇĂÍş´éŇąĹčҧ â´ÂąÓżŃ§ˇěŞŃą motorCW() áĹĐ
motorCCW() ¨ŇˇˇŇĂ·´ĹͧµÍą·Őč 1
ÁŇăĘčŧăąâ»ĂáˇĂÁąŐé´éÇ ¨ŇˇąŃ鹨֧ÍŃ»âËŴŧ NodeMCU v.3
3.
ŕ»Ô´ Serial Monitor (Ctrl+Shift+M)
áĹĐ»éÍą¤ÓĘŃč§ ‘1’ ËĂ×Í ‘2’ áĹéÇĘѧࡵˇŇĂËÁŘą˘Í§ÁÍŕµÍĂě
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 |
// Control 4-Phase Step Motor with
ULN2003A // by Serial Data // // 5-V Step Motor is 28BYJ48 // Pin 1-4 = (Blue, Pink, Yellow, and
Orange) // Pin 5 = VCC (Red) int motorPin1 = D1; int motorPin2 = D2; int motorPin3 = D3; int motorPin4 = D4; int motorDelay
= 5; //variable
to set motor speed // Long delay = slow speed(8*motorDelay per 1 rev) char inchar;
// Input control character void setup() {
Serial.begin(9600);
pinMode(motorPin1, OUTPUT);
pinMode(motorPin2, OUTPUT);
pinMode(motorPin3, OUTPUT);
pinMode(motorPin4, OUTPUT); } void loop() { inchar
= Serial.read(); if(inchar == '1') { for(int
i=0; i < 20; i++)
{ motorCW(); } delay(100); } if(inchar == '2') { for(int
i=0; i < 20; i++)
{ motorCCW(); } delay(100); } } |
áşş˝ÖˇËŃ´·éŇ¡ŇĂ·´Ĺͧ
¨§µčÍǧ¨Ă´Ń§ĂŮ»·Őč 8 áĹĐŕ˘ŐÂąâ¤é´â»ĂáˇĂÁ·Őč·ÓăËé
ĽŮéăŞéĘŇÁŇö¤Çş¤ŘÁĘŕµç»»Ôé§ÁÍŕµÍĂěăËéËÁŘąµŇÁ·ÔČ·ŐčˇÓËą´ä´éŕÁ×čÍÁŐˇŇá´»ŘčÁˇ´
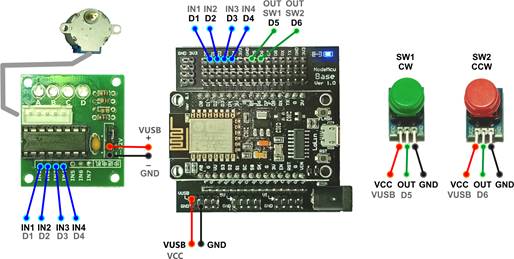
ĂŮ»·Őč
8 ˇŇĂŕŞ×čÍÁµčÍ
NodeMCU
v.3 ˇŃşşÍĂ촢ѺĘŕµç»»Ôé§ÁÍŕµÍĂě Ęŕµç»»Ôé§ÁÍŕµÍĂě
áĹĐ»ŘčÁˇ´Ęͧ»ŘčÁŕľ×čͤǺ¤ŘÁˇŇ÷ӧҹ˘Í§ÁÍŕµÍĂě´éÇ»ŘčÁˇ´