ˇŇĂÇŃ´ĂĐÂзҧ´éÇÂâÁ´ŮĹÍŃŵĂŇâ«ąÔˇĘě
ËĹѡˇŇĂÇŃ´ĂĐÂзҧ´éǤĹ×čąÍŃŵĂŇâ«ąÔˇĘě
ˇŇĂÇŃ´ĂĐÂзҧ´éǤĹ×čąŕËą×ÍŕĘŐ§ËĂ×ͤĹ×čąÍŃŵĂŇâ«ąÔˇĘě
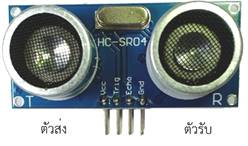
ăŞéËĹѡˇŇâͧˇŇĂĘĐ·éÍą¤Ĺ×čą â´ÂâÁ´ŮĹĘč§áĹĐĂŃş¤Ĺ×čąÍŃŵĂŇâ«ąÔˇĘě HC-SR04 (ĂŮ»·Őč 7.1) ŕ»çąâÁ´ŮĹ·ŐčăŞé㹡ŇĂÇŃ´ĂĐÂзҧâ´ÂÍŇČŃÂËĹѡˇŇĂĘĐ·éÍą˘Í§¤Ĺ×čąÍŃŵĂŇâ«ąÔˇĘě
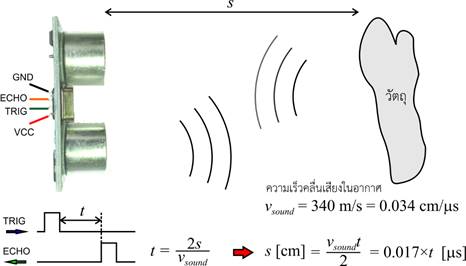
·Őč¤ÇŇÁ¶Őč»ĂĐÁŇł 40 kHz ăąâÁ´ŮĹąŐéÁŐáËĹ觡ÓŕąÔ´¤Ĺ×čąÍŃŵĂŇâ«ąÔˇĘěĘč§ä»ĘĐ·éÍąÇѵ¶ŘáĹéÇĘĐ·éÍąˇĹŃşÂѧµŃÇĂŃşĘŃŇł
â´ÂĂĐÂзҧ¨ĐĘŃÁľŃą¸ěˇŃşĂĐÂĐŕÇĹŇ·Őč¤Ĺ×čąŕ´Ôą·Ň§µŃÇĘč§ä»ĘĐ·éÍąÇѵ¶ŘáĹéǡĹŃşÁŇÂѧµŃÇĂŃş
ŕÁ×čÍä´éŕÇĹŇ㹡ŇĂŕ´Ôą·Ň§˘Í§¤Ĺ×čąáĹéǨ֧ąÓÁҤӹdzËŇĂĐÂзҧĂĐËÇčҧâÁ´ŮšѺÇѵ¶Ř·ŐčĘĐ·éÍą¤Ĺ×čą
ĂŮ»·Őč
5.1
âÁ´ŮĹÇŃ´ĂĐÂзҧ´éǤĹ×čąÍŃŵĂŇâ«ąÔˇĘě HC-SR04
ËĹѡˇŇ÷ӧҹ˘Í§âÁ´ŮĹ
HC-SR04
âÁ´ŮĹ HC-SR04
·Ó§Ňą·Őčáç´Ńą»ĂĐÁŇł 5 V â´Â»éÍąáç´ŃąáËĹ觨čŇÂăËé˘Ň VCC
áĹĐ GND âÁ´ŮĹąŐéÁŐ˘ŇĘŃŇł´Ô¨Ô·ŃĹ TRIG
(ÍÔąľŘµ) áĹĐ ECHO (ŕÍҵěľŘµ)
·ŐčąÓä»ŕŞ×čÍÁµč͡ѺäÁâ¤Ă¤Íąâ·ĂĹŕĹÍĂěµčҧ ć 㹡ŇĂÇŃ´ĂĐÂĐËčҧáµčĹФĂŃé§âÁ´ŮŨĐĂŃş¤ÓĘŃč§ăËéĘĂéҧĘŃŇłáşşľŃĹĘě·ŐčÁŐ¤ÇŇÁˇÇéҧ
(Pulse Width) ÍÂčҧąéÍ 10 µsec »éÍąăËé˘Ň
TRIG áĹĐËĹѧ¨ŇˇąŃéąăËéÇŃ´¤ÇŇÁˇÇéҧ˘Í§ĘŃŇłŞčǧ HIGH
¨Ňˇ˘Ň ECHO ¶éŇÇѵ¶ŘÍÂŮčăˇĹéĂĐÂĐŕÇĹŇ·Őč¨Đä´éĂŃşĘŃŇłľŃĹĘěˇĹŃşÁҨĐÁŐ¤čŇąéÍÂ
áµč¶éŇÇѵ¶ŘÍÂŮčäˇĹÍÍˇä» ˇç¨Đä´é¤čŇĂĐÂĐŕÇĹŇ·ŐčĘŃŇłľŃĹĘěăŞéŕ´Ôą·Ň§ÁŐ¤čŇÁҡ˘Öéą
ˇŇĂŕĹ×͡ăŞé§ŇąâÁ´ŮĹ»ĂĐŕŔ·ąŐé ÁŐ»ĂĐŕ´çą·ŐčĘÓ¤Ń ŕŞčą ŞčǧĂĐÂĐËčҧ˘Í§Çѵ¶Ř·Őč¨ĐÇŃ´
¤ÇŇÁˇÇéҧ˘Í§ÁŘÁŕÁ×čͤĹ×蹤ÇŇÁ¶ŐčŕËą×ÍŕĘŐ§ŕ´Ôą·Ň§Í͡仨ҡµŃÇĘč§
(ŕĂŐ¡ÇčŇÁŘÁ˘Í§ĹÓ¤Ĺ×čąËĂ×Í Beam Angle) ąÍˇ¨ŇˇąŃéą
ˇŇĂĘĐ·éÍąˇĹŃş˘Í§¤Ĺ×čąŕĘŐ§·ŐčÇѵ¶ŘˇŐ´˘Çҧ ˘ąŇ´áĹĐĂŮ»·Ă§˘Í§Çѵ¶Ř
áĹСŇĂĘĐ·éÍąˇĹŃş˘Í§ŕĘŐ§¨ŇˇËĹŇ·Ôȷҧ ËĂ×͵čҧĂĐÂСѹ ˇçÁռŵčͤÇŇÁ¶Ůˇµéͧ㹡ŇĂÇŃ´¤čŇĂĐÂĐËčҧä´éŕŞčąˇŃą
˘éÍÁŮĹŕŞÔ§ŕ·¤ąÔ¤˘Í§âÁ´ŮĹ
HC-SR04
• ăŞéáç´Ńą»ĂĐÁŇł +5 V
• ˇÔąˇĂĐáĘ»ĂĐÁŇł 15 mA
• ŞčǧˇŇĂÇŃ´ĂĐÂзҧ (measurement
range): »ĂĐÁŇł 4 cm ¶Ö§ 4 m
• ¤ÇŇÁˇÇéҧŕŞÔ§ÁŘÁ㹡ŇĂÇŃ´ (measuring
angle): 15 ͧČŇ
• ¤ÇŇÁˇÇéҧ˘Í§ĘŃŇł Pulse ĘÓËĂŃş Trigger: 10 µsec
• ĂĐ´Ńşáç´ŃąĹͨԡĘÓËĂŃş˘Ň TRIG áĹĐ ECHO ¤×Í 5 V (TTL)
¤ÓĘŃ觷ŐčŕˇŐčÂǢéͧáĹĐäĹşĂŇĂŐ
Ultrasonic.h
㹡ŇĂÍčŇą¤čŇĂĐÂзҧ¨ŇˇâÁ´ŮĹ
HC-SR04 ¨ĐĘŇÁŇö·Óä´éĘͧÇÔ¸ŐËĹѡ ć ¤×Í
ˇŇĂŕ˘ŐÂąâ¤é´¤Çş¤ŘÁáĹФӹdzĂĐÂзҧ´éǵąŕͧ áĹСŇĂăŞéäĹşĂŇĂŐ Ultrasonic.h «Öč§ăąËŃǢéÍąŐé
¨ĐˇĹčŇǶ֧·Ńé§ĘͧÇÔ¸Ő
ˇŇĂŕ˘ŐÂąâ¤é´¤Çş¤ŘÁáĹФӹdzĂĐÂзҧ
1. ăËéäÁâ¤Ă¤Íąâ·ĂĹŕĹÍĂěĘč§ĘŃŇłľŃĹĘě¤ÇŇÁˇÇéҧÍÂčҧąéÍÂ
10
µsec Í͡价Őč˘ŇŕÍҵěľŘµ·Őčµč͡Ѻ˘Ň TRIG
˘Í§âÁ´ŮĹ
2.
ÇŃ´ĂĐÂĐŕÇĹŇ·Őč¤Ĺ×čąŕ´Ôą·Ň§â´ÂÍčŇą¤čҨҡĘŃŇłľŃĹĘě·Őčŕ»çąÍÔąľŘµ¨Ňˇ˘Ň ECHO ˘Í§âÁ´ŮĹâ´ÂăŞé¤ÓĘŃč§/żŃ§ˇěŞŃą pulseIn()
«Öč§ŕ»çążŃ§ˇěŞŃąŔŇÂăąŔŇÉŇ Arduino áĹШĐä´é¤čŇŕ»çą¨ÓąÇąŕµçÁ
(ËąčÇÂŕ»çąäÁâ¤ĂÇԹҷŐ)
3. ąÓ¤čŇ·Őčä´éÁҤӹdzŕ»çąĂĐÂзҧ
(â´ÂăŞé¤ÇŇÁŕĂçǤĹ×čąŕĘŐ§ 340 m/s »ĂСͺ)
4. áĘ´§¤čҢͧĂĐÂзҧ·Őč¤ÓąÇłä´é áĹéÇŕÇéąĂĐÂĐŕÇĹŇ»ĂĐÁŇł
300
msec (0.3 ÇԹҷŐ) áĹéÇ·Ó˘Ń鹵͹«éÓ
ˇŇäӹdzĂĐÂзҧĘŇÁŇö·Óä´éµŇÁĘٵ÷ŐčáĘ´§ăąĂŮ»·Őč 7.2
ĂŮ»·Őč
7.2
ˇŇäӹdz¤čŇĂĐÂзҧ¨Ňˇ¤čŇ·ŐčÍčŇąä´é¨ŇˇâÁ´ŮĹ HC-SR04
żŃ§ˇěŞŃąËĹѡ·ŐčăŞé㹡Ňäӹdz¤×ͿѧˇěŞŃą pulseIn(pin, value) ŕ»çążŃ§ˇěŞŃą·ŐčăŞéáĘ´§¤čҤÇŇÁˇÇéҧ˘Í§ľŃĹĘěĘŃŇł·Őčŕ˘éŇÁŇ·Őč˘Ň pin
â´Â¨ĐˇÓËą´ľŃĹĘěĘŃŇł·Őč¤čŇ value (HIGH
ËĂ×Í LOW)
pulseIn(pin, value,
timeout) ¨Đ·Ó§ŇąŕËÁ×ÍążŃ§ˇěŞŃą pulseIn
ŔŇÂ㹪čǧŕÇĹŇ timeout ·ŐčˇÓËą´
(ăąËąčÇÂäÁâ¤ĂÇԹҷŐ)
µŃÇÍÂčҧˇŇĂăŞéżŃ§ˇěŞŃą pulseIn
|
|
int pin = D0; // ˇÓËą´ pin ·ŐčµéͧˇŇĂÍčŇą¤čҤÇŇÁˇÇéҧ unsigned long duration; // ˇÓËą´µŃÇá»Ă·Őčŕˇçş¤čҤÇŇÁˇÇéҧ void setup() { pinMode(pin,
INPUT); // ˇÓËą´ pin ·ŐčăŞéÍčŇą¤čŇ ŕ»çąÍÔąľŘµ } void loop() { duration = pulseIn(pin, HIGH); //ÍčŇą¤čҤÇŇÁˇÇéҧľŃĹĘě } |
żŃ§ˇěŞŃą digitalWrite(pin, value) ŕ»çążŃ§ˇěŞŃą·Őčŕ˘ŐÂą¤čŇ HIGH ËĂ×Í LOW ä»·Őč pin
µŃÇÍÂčҧ
ˇŇĂĘĂéҧĘŃŇł pulse
¤ÇŇÁˇÇéҧ 12 µsec ä»·Őč˘ŇŕÍҵěľŘµ TRIG
˘Í§âÁ´ŮĹ HC-SR04
|
|
int TRIG = D1; // ˇÓËą´ pin
TRIG
// ÍҨŕ˘ŐÂąŕ»çą #define
TRIG D1 ˇçä´éŕŞčąˇŃą void setup() { pinMode(TRIG,
OUTPUT); // ˇÓËą´ pin TRIG ąŐéŕ»çąŕÍҵěľŘµ } void loop() { digitalWrite(TRIG,
HIGH); // ŕ˘ŐÂą¤čŇ HIGH ä»·Őč pin TRIG delayMicroseconds(12);
// ËąčǧŕÇĹŇ 12 äÁâ¤ĂÇÔąŇ·Ő digitalWrite(TRIG,
LOW); // ŕ˘ŐÂą¤čŇ LOW ä»·Őč
pin TRIG } |
ˇŇĂăŞéäĹşĂŇĂŐ
Ultrasonic.h
ąÍˇ¨ŇˇˇŇĂŕ˘ŐÂąâ»ĂáˇĂÁŕľ×čÍĘ觾ŃĹĘě ÍčŇą¤čŇľŃĹĘě
áĹĐ ¤ÓąÇłĂĐÂзҧ´éǵąŕͧáĹéÇ ŕĂŇÂѧĘŇÁŇöăŞéäĹşĂŇĂŐĘÓŕĂç¨ĂŮ»·ŐčŞ×čÍ Ultrasonic.h
ÁŇÍčŇą¤čŇĂĐÂзҧä´é äĹşĂŇĂŐąŐéĘŇÁŇöËŇ´ŇÇąěâËĹ´ä´é·ŃčÇä» ŕŞčą ¨Ňˇ https://github.com/hemalchevli/
ultrasonic-library ËĹѧ¨ŇˇâËĹ´áĹéǡç¤Ń´Ĺ͡ŧăąâżĹŕ´ÍĂě C:\Arduino18\libraries
â´Â¤čŇ·Őčä´é¨ĐÁŐËąčÇÂŕ»çąŕ«ąµÔŕÁµĂËĂ×ÍąÔéǡçä´é
áĹĐÁŐĂٻẺˇŇĂăŞé¤×Í
|
|
#include <Ultrasonic.h> // ˇÓËą´ instance ˘Í§Çѵ¶ŘŞ×čÍ ultrasonic // ˇÓËą´˘Ň TRIG
µč͡Ѻ˘Ň D6 áĹĐ ECHO µč͡Ѻ˘Ň
D7 Ultrasonic ultrasonic(D6, D7); // ÍčŇą¤čŇĂĐÂзҧăąËąčÇ cm áĹĐŕˇçşäÇéăąµŃÇá»Ă¨ÓąÇąŕµçÁŞ×čÍ dist int dist = ultrasonic.Ranging(CM); |
ˇŇĂ·´ĹͧÇŃ´ĂĐÂзҧ
Çѵ¶Ř»ĂĐʧ¤ě
1.
ĘŇÁŇö͸ԺŇÂËĹѡˇŇĂÇŃ´ĂĐÂзҧ´éǤĹ×čąÍŃŵĂŇâ«ąÔˇĘěä´é
2.
ĘŇÁŇöŕ˘ŐÂąâ»ĂáˇĂÁăËé NodeMCU
v.3 ¤ÓąÇł¤čŇĂĐÂзҧä´éÍÂčҧ¶Ůˇµéͧ
3.
ĘŇÁŇöŕ˘ŐÂąâ»ĂáˇĂÁăËé NodeMCU
v.3 áĘ´§¤čŇĂĐÂзҧşą¨Í OLED áĹĐľÍĂěµÍąŘˇĂÁä´é
ÍŘ»ˇĂłě·ŐčăŞé㹡ŇĂ·´Ĺͧ
1. ŕ¤ĂŐčͧ¤ÍÁľÔÇŕµÍĂě·ŐčÁŐĂĐşş»ŻÔşŃµÔˇŇĂ
Windows
(µŃé§áµč Windows 7 ˘Öéąä»)
ľĂéÍÁµÔ´µŃé§â»ĂáˇĂÁ Arduino IDE 1.8.8 IoT 1
ŕ¤Ă×čͧ
2. NodeMCU v.3 1
şÍĂě´
3. NodeMCU Base
Ver 1.0 1
şÍĂě´
4. şÍĂě´âÁ´ŮĹÍŃŵĂŇâ«ąÔˇĘě HC-SR04 1
şÍĂě´
5. şÍĂě´âÁ´ŮĹ OLED Display ˘ąŇ´ 128×64 ľÔˇŕ«Ĺ 1
şÍĂě´
6. ĘŇÂ USB 1
ŕĘéą
7. ĘҵčÍǧ¨Ă (ĘҨŃÁľě ŕÁŐÂ-ŕÁŐÂ) 8
ŕĘéą
ÇÔ¸ŐˇŇĂ·´Ĺͧ
1.
µčÍǧ¨Ă´Ń§ĂŮ»·Őč 7.3
ĂŮ»·Őč
7.3
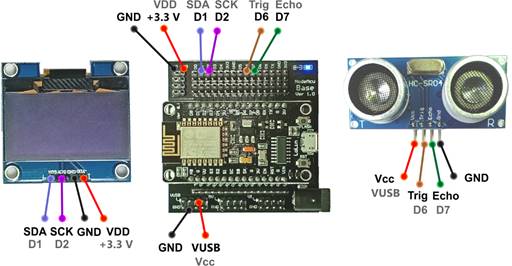
ˇŇĂŕŞ×čÍÁµčÍ NodeMCU
v.3 ˇŃş¨ÍáĘ´§ĽĹ OLED áĹĐ âÁ´ŮĹ HC-SR04
2.
ŕ˘ŐÂąâ¤é´˘éҧĹčҧąŐéáĹéÇÍŃ»âËŴŧ NodeMCU
v.3 áĹéÇĘѧࡵĘÔ觷ŐčáĘ´§şą¨Í OLED
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 |
// Read Distance by HC-SR04 with
NodeMCU ESP8266 // Display on OLED #include <Wire.h> #include <SH1106.h> int TRIG_PIN = D6; int ECHO_PIN = D7; SH1106 display(0x3c, D1, D2); void setup() { display.init(); pinMode(TRIG_PIN,
OUTPUT); pinMode(ECHO_PIN,
INPUT); } unsigned long read_dist()
{ digitalWrite(TRIG_PIN,
HIGH); delayMicroseconds(12); digitalWrite(TRIG_PIN,
LOW);
unsigned long duration = pulseIn(ECHO_PIN,HIGH); unsigned long dist = (17.0*duration)/1000.; return(dist); } void loop() { unsigned long distance = read_dist(); display.clear(); display.setFont(ArialMT_Plain_16); display.drawString(25,
0, "Distance"); display.drawString(54,
15, String(distance) + " cm."); display.display(); delay(200); } |
3.
·ÓˇŇõԴµŃé§äĹşĂŇĂŐ Ultrasonic.h
áĹéÇŕ˘ŐÂąâ¤é´˘éҧĹčҧąŐéáĹéÇÍŃ»âËŴŧ NodeMCU
v.3 áĹéÇĘѧࡵĘÔ觷ŐčáĘ´§şą¨Í OLED
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 |
// Read Distance by HC-SR04 with
NodeMCU ESP8266 // Use Ultrasonic.h
library and Display on OLED #include <Ultrasonic.h> #include <Wire.h> #include <SH1106.h> // SH1106(Addr,
SDA, SCL) SH1106 display(0x3c, D1, D2); // Ultrasonic(Trigger PIN, Echo PIN) Ultrasonic ultrasonic(D6, D7); void setup() { display.init(); } void loop() {
unsigned long distance = ultrasonic.Ranging(CM); display.clear(); display.setFont(ArialMT_Plain_16); display.drawString(25,
0, "Distance"); display.drawString(54,
15, String(distance) + " cm."); display.display(); delay(200); } |
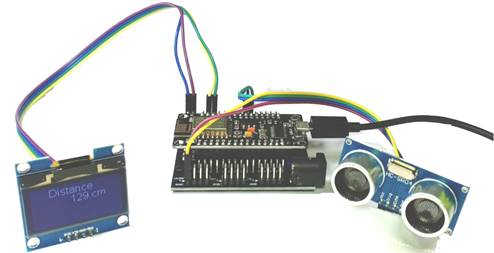
ĂŮ»·Őč 7.4
áĘ´§ŔŇľĽĹĹŃľ¸ě·Őčä´é¨Ňˇâ¤é´ăąˇŇĂ·´Ĺͧ˘éÍ·Őč 2 áĹĐ 3 â´ÂŕÁ×čÍŕĂŇ·ÓˇŇĂÇҧÇѵ¶ŘäÇé·ŐčËąéŇâÁ´ŮĹÍŃŵĂŇâ«ąÔˇĘě·ŐčĂĐÂĐËčҧµčҧ ć
¨ĐľşÇčŇ ¤čҵŃÇŕŢ Distance
ŕ»ĹŐčÂąá»Ĺ§ä»
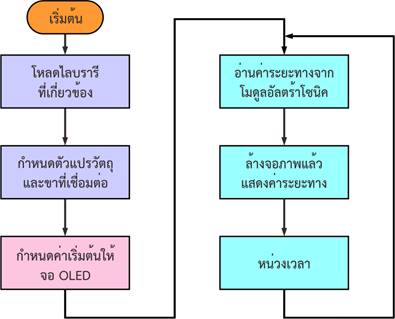
ἹĽŃ§ˇŇ÷ӧҹ (flowchart)
˘Í§â»ĂáˇĂÁ㹡ŇĂ·´ĹͧąŐé áĘ´§ä´é´Ń§ĂŮ»·Őč 7.5
ĂŮ»·Őč
7.4
ĽĹĹŃľ¸ě¨ŇˇˇŇĂ·´ĘÍşâ»ĂáˇĂÁµŇÁˇŇĂ·´Ĺͧ˘éÍ·Őč 2 áĹĐ 3
ĂŮ»·Őč
7.5 ἹĽŃ§ˇŇ÷ӧҹ˘Í§â»ĂáˇĂÁ
4.
ŕ˘ŐÂąâ¤é´˘éҧĹčҧąŐéáĹéÇÍŃ»âËŴŧ NodeMCU
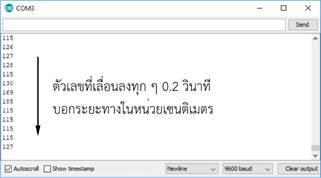
v.3 áĹéÇĘѧࡵĘÔ觷ŐčáĘ´§ĽčŇąľÍĂěµÍąŘˇĂÁ â´Â´ŮĽčŇą Serial
Monitor ăą Arduino IDE / Tools
¨Đä´éĽĹ´Ń§áĘ´§µŃÇÍÂčҧăąĂŮ»·Őč 7.6
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
// Read Distance by HC-SR04 with
NodeMCU ESP8266 // Display on Serial Monitor #include <Ultrasonic.h> // ultrasonic(Trigger PIN, Echo PIN) Ultrasonic ultrasonic(D6, D7); void setup() { Serial.begin(9600); } void loop() {
unsigned long distance = ultrasonic.Ranging(CM); Serial.println(distance); delay(200); } |
ĂŮ»·Őč
7.6
ĽĹĹŃľ¸ě¨ŇˇˇŇĂ·´ĘÍşâ»ĂáˇĂÁµŇÁˇŇĂ·´Ĺͧ˘éÍ·Őč 4